Keszoox
TJA1042 / TJA1051 High-Speed CAN Bus Transceiver Module — ISO 11898, Arduino, ESP32
TJA1042 / TJA1051 High-Speed CAN Bus Transceiver Module ISO 11898, Arduino, ESP32

Couldn't load pickup availability
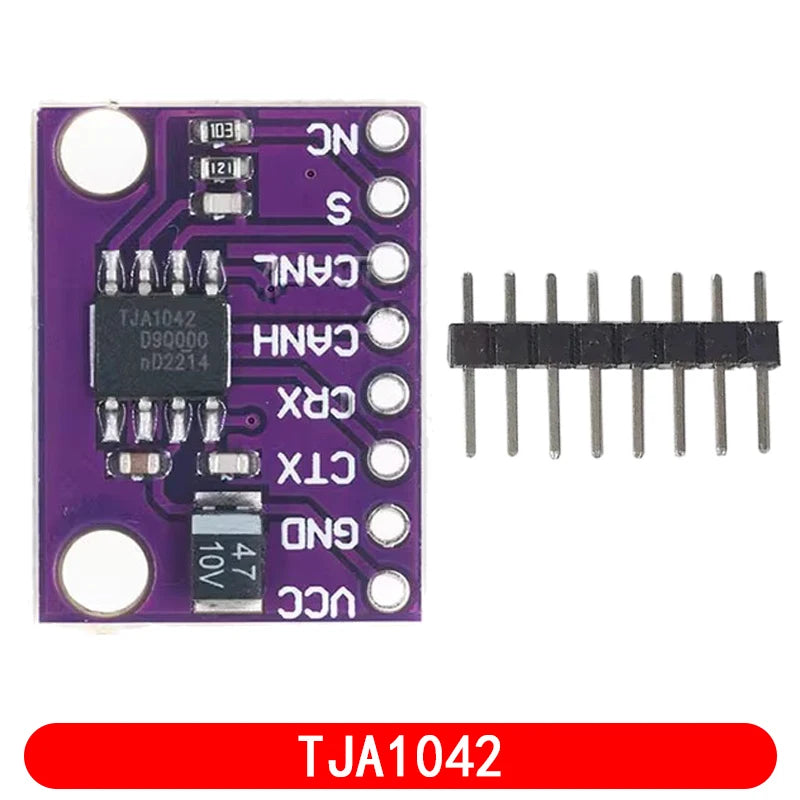
TJA1042 / TJA1051 — High-Speed CAN Bus Transceiver Module, ISO 11898
The TJA1042 and TJA1051 are high-speed CAN bus transceiver modules from NXP — the physical layer interface between a CAN controller (ESP32, STM32, MCP2515) and the CAN bus differential pair (CANH/CANL). CAN bus is the standard communication protocol in automotive ECUs, industrial automation, and robotics. These transceivers support ISO 11898-2 high-speed CAN at up to 1Mbps with ultra-low power standby mode.
Key Specifications
| Parameter | TJA1042 | TJA1051 |
|---|---|---|
| Standard | ISO 11898-2 | ISO 11898-2 |
| Max Data Rate | 1Mbps | 1Mbps |
| Supply Voltage (VCC) | 4.5V – 5.5V | 4.5V – 5.5V |
| I/O Voltage | 3.3V / 5V compatible | 3.3V / 5V compatible |
| Standby Mode | Yes (low power) | Yes (low power) |
| Bus Fault Protection | ±58V | ±58V |
| Operating Temperature | -40°C to +150°C | -40°C to +125°C |
| Package (IC) | SO8 / DFN8 | SO8 / DFN8 |
| Module Form Factor | Breakout board with screw terminals | Breakout board with screw terminals |
TJA1042 vs TJA1051 — Key Differences
| Feature | TJA1042 | TJA1051 |
|---|---|---|
| Standby Wake-up | Remote wake-up via CAN bus ✅ | No remote wake-up ❌ |
| Max Temp | +150°C (AEC-Q100 Grade 0) | +125°C (AEC-Q100 Grade 1) |
| Best For | Automotive (engine bay) | General automotive & industrial |
Why Choose TJA1042/TJA1051?
- ISO 11898-2 compliant — industry-standard CAN physical layer for guaranteed interoperability
- 1Mbps data rate — maximum CAN bus speed for high-speed automotive and industrial networks
- ±58V bus fault protection — survives wiring faults and load dump transients
- 3.3V/5V I/O compatible — works directly with ESP32, STM32, Arduino, and Raspberry Pi
- Ultra-low standby current — ideal for battery-powered CAN nodes
- Breakout module — screw terminals for CANH/CANL, VCC, GND, and TXD/RXD
Typical Applications
- Automotive OBD-II / ECU interface — read vehicle CAN bus data with ESP32 or STM32
- Industrial automation — CANopen and DeviceNet node physical layer
- Robotics — multi-axis servo communication over CAN bus
- EV battery management — BMS cell monitoring over CAN network
- Arduino CAN bus projects — use with MCP2515 CAN controller module
Compatible With
Works with MCP2515 CAN controller (SPI interface), ESP32 built-in TWAI/CAN controller, STM32 bxCAN, and Raspberry Pi with MCP2515 HAT. Compatible with Arduino CAN libraries (arduino-CAN, mcp_can).
FAQ
Q: Do I need a CAN controller IC separately?
A: Yes. The TJA1042/TJA1051 is a transceiver (physical layer only). You need a CAN controller such as MCP2515 (SPI) or use the built-in CAN/TWAI peripheral in ESP32 or STM32.
Q: What termination resistor is needed?
A: CAN bus requires 120Ω termination at each end of the bus. Many modules include an onboard 120Ω resistor that can be enabled via jumper.
Q: Can TJA1042 be used with 3.3V microcontrollers?
A: Yes. The TXD/RXD I/O pins are compatible with 3.3V logic levels, making it suitable for ESP32, STM32, and other 3.3V systems.
Package Contents
- 1× TJA1042 or TJA1051 CAN Bus Transceiver Module (as selected)