





16-Channel PWM Servo Controller Shield for Arduino
16-Channel PWM Servo Controller Shield for Arduino
Compatible JST cables for sensors and modules — secure & reliable. Shop now.

Couldn't load pickup availability
16-Channel PWM Servo Controller Shield for Arduino
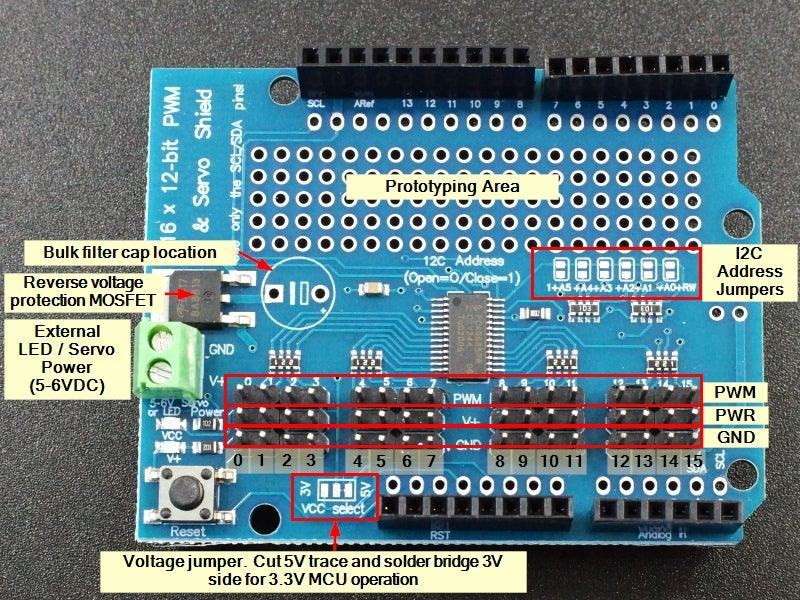
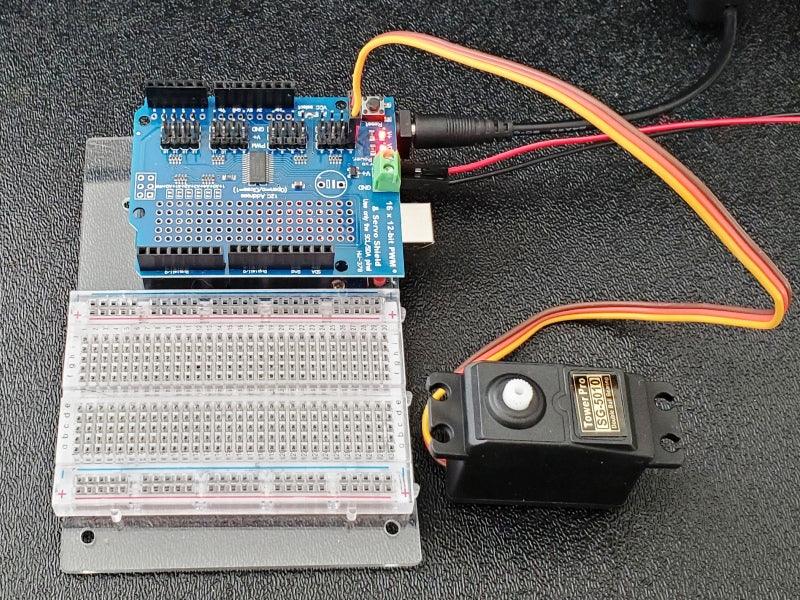
A 16-channel PWM servo controller shield based on the PCA9685 I2C PWM driver. Stacks directly onto Arduino Uno or Mega and allows control of up to 16 servos or PWM devices simultaneously via just 2 I2C wires — freeing up all Arduino digital pins for other uses. Features 12-bit resolution and adjustable PWM frequency from 40Hz to 1000Hz.
Key Specifications
- Driver: PCA9685 | Channels: 16 PWM outputs
- Interface: I2C | Address: 0x40 (configurable)
- Resolution: 12-bit (4096 steps) | Frequency: 40–1000Hz
- Servo power: Separate VCC input (up to 6V for servos)
- Compatible: Arduino Uno / Mega / Leonardo
- Compliance: RoHS compliant
Why Choose This?
- ✅ 16 servos via 2 I2C wires — frees all Arduino digital pins for other uses
- ✅ Chainable — stack multiple shields for up to 992 PWM channels
- ✅ 12-bit resolution — smooth, precise servo positioning
- ✅ Separate servo power — power servos independently from Arduino logic
Typical Applications
- Robotic arm and hexapod robot servo control
- Pan-tilt camera gimbal control
- LED PWM dimming and RGB control
- Multi-servo animatronics and puppetry


Blog posts
View all-

Best JST Connector Crimping Tools in 2026: Engi...
Choosing the wrong crimping tool ruins JST connectors and wastes wire. This guide compares the top crimping tools for JST SH, GH, PH, XH, and VH series — including Engineer...
Best JST Connector Crimping Tools in 2026: Engi...
Choosing the wrong crimping tool ruins JST connectors and wastes wire. This guide compares the top crimping tools for JST SH, GH, PH, XH, and VH series — including Engineer...
-

Molex KK 254 vs Mini-Fit Jr. vs Micro-Fit 3.0: ...
Choosing between Molex KK 254, Mini-Fit Jr., and Micro-Fit 3.0? This guide compares pitch, current rating, locking mechanism, wire gauge, and typical applications — with decision tables, part number references,...
Molex KK 254 vs Mini-Fit Jr. vs Micro-Fit 3.0: ...
Choosing between Molex KK 254, Mini-Fit Jr., and Micro-Fit 3.0? This guide compares pitch, current rating, locking mechanism, wire gauge, and typical applications — with decision tables, part number references,...
-

DuPont Connector vs JST PH 2.0: Pinout, Specs &...
Not sure whether to use a DuPont 2.54mm or JST PH 2.0mm connector? This guide compares pitch, locking mechanism, current rating, pinout, and best use cases — so you can...
DuPont Connector vs JST PH 2.0: Pinout, Specs &...
Not sure whether to use a DuPont 2.54mm or JST PH 2.0mm connector? This guide compares pitch, locking mechanism, current rating, pinout, and best use cases — so you can...


