







HC-SR501 PIR Motion Sensing Module
HC-SR501 PIR Motion Sensing Module
Compatible JST cables for sensors and modules — secure & reliable. Shop now.

Couldn't load pickup availability


- ★Product Description
- ★About us
- ★Custom cable
Uses the infrared body heat to detect motion at up to 21 feet.
DESCRIPTION
The HC-SR501 PIR Motion Sensing Module uses the infrared radiation produced by body heat to detect motion at up to a distance of 21 feet.
PACKAGE INCLUDES:
- HC-SR501 PIR Motion Sensing Module
KEY FEATURES OF HC-SR501 MOTION SENSING MODULE:
- Detects body heat at distance of up to 21 feet with sensitivity control
- Multiple detection modes
- 4.5 to 20V operation (5V compatible)
- An optional bracket is available for mounting
PIR (Passive Infrared) Motion Sensors are used to detect motion. They work by detecting the changes in infrared radiation that come from body heat. The sensor has two windows that have different fields of view. Since infrared comes from many different sources, it is differences in infrared between what the two sensor windows detect within a short period of time that is determined to be motion.
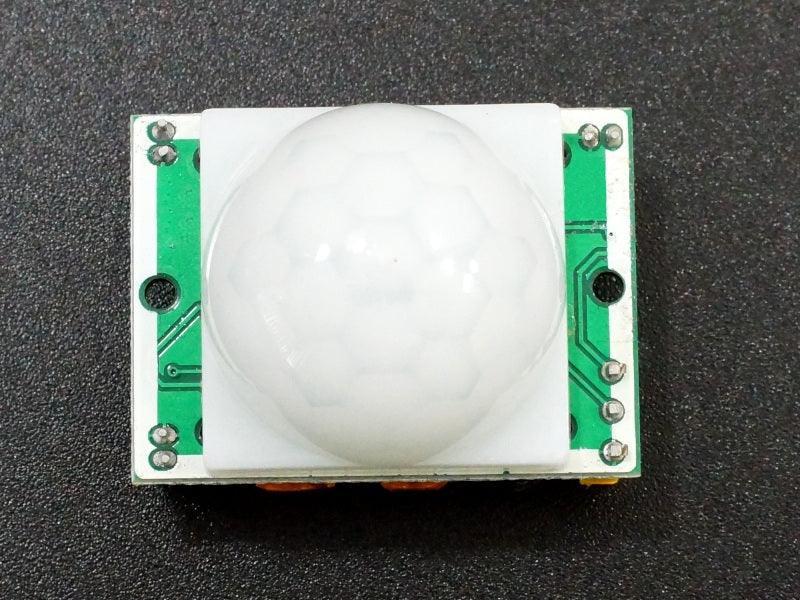
The sensors have a range of up to 7 meters (21 feet) with sensitivity, time delay and trigger options that allow it to be optimized for your application. The sensor has a white plastic dome over it. This dome is used to increase the field of view and to help provide some protection to the sensor.
A common use for the sensor is to detect when a person or animal moves in or out of the sensor range and then take some action such as turning lights on/off, enabling a fan, enabling a Halloween prop or perhaps taking a picture.
Basic operation is simple. Just apply power 4.5V – 20V and ground to the module. The sensor output is a logic HIGH when motion is detected and LOW when it is idle. This output can be connected to a microcontroller or it can be connected directly to a relay module that can handle a logic level input in a case where you just want to turn something on/off based on motion.
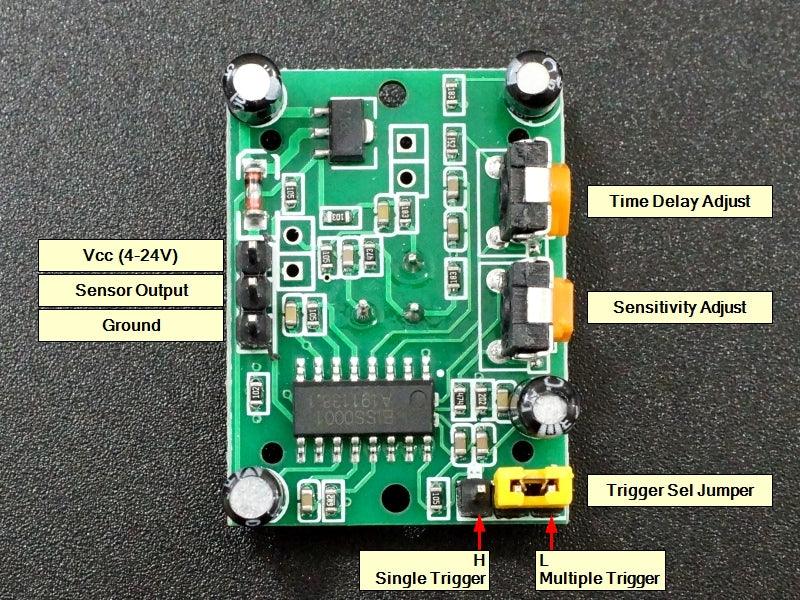
There are two potentiometers and a jumper on the module that affect it’s behavior. Let’s take a look at each of these.
Trigger Mode
The trigger mode determines how the module will react to each motion that it detects. There are two basic modes of operation
Multiple Trigger Mode: Constant motion will cause a series of triggers to occur while there is motion.
Single Trigger Mode: Constant motion will cause a single trigger to occur while there is motion.
Trigger Select Jumper
L: Multiple Trigger Mode – The output goes HIGH as soon as motion is detected and stays HIGH for the duration of the Time Delay. Further detection is blocked until the output drops back to LOW at the end of the Time Delay. If there is still motion, the module will immediately trigger again and the output will go HIGH again.
H: Single Trigger Mode – The output goes HIGH as soon as motion is detected and stays HIGH for the duration of the time delay. Unlike Multiple Trigger Mode, further motion detection is not blocked so the time delay is restarted each time motion is detected. The output returns to LOW only after Time Delay once motion is no longer detected.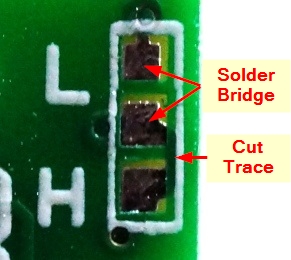
Note: Some modules have a berg jumper and some have 3 solder pads for setting the Trigger Mode.
If the module has 3 solder pads, a copper trace enables the H (single trigger) mode by default which is the most common to use.
If it is desired to enable the multiple trigger mode, cut the trace to the right of the ‘H’ pads and solder bridge the two ‘L’ solder pads as shown to the right.
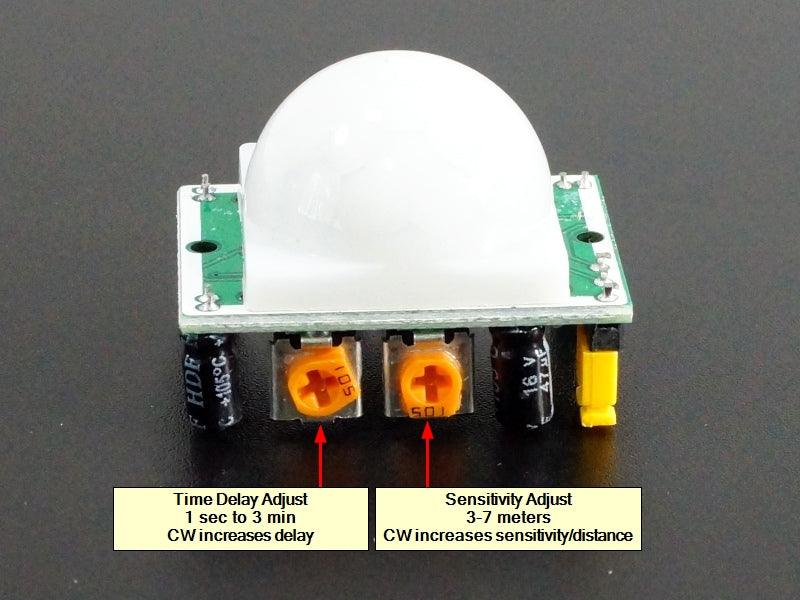
Sensitivity Adjust
The Sensitivity Adjust Pot sets the maximum detection range. The sensitivity can be adjusted over a range of approximately 3 meters to 7 meters (9 – 21 feet). Turning the adjustment CW will increase the sensitivity and thus the range that it can detect movement.
Time Delay
The Time Delay Adjust Pot sets how long the output remains HIGH after it detects motion. This can be adjusted from approximately 1 second up to about 3 minutes. Turning the adjustment CW increases the delay. Turning it CCW decreases the delay.
Lockout Time
Note that when the module output drops LOW, it will stay LOW for approximately 2 seconds. During this time, the motion sensing is locked out.
If you have the module set for a 1 second time delay and the jumper set to ‘L’ and wave your hand in front of the sensor, you will see the output go HIGH for 1 second and then drop LOW for about 2 seconds. After the 2 second lock-out, it will again go HIGH for 1 second and repeat for as long as you are waving your hands.
Power On Delay
One important thing to note about the sensor is that it takes it about a minute after power is first applied for it to go through its initialization sequence where it learns the ambient infrared signature of its environment. Basically it is calibrating itself to its environment so that it can determine what constitutes motion.
During that calibration time, false triggers are likely to occur so any triggers during this time should be ignored. It is important that there is not a lot of motion in the sensors view when it is going through its self-calibration as that can interfere with the calibration process.
The module has a very low power draw of < 2 mA. Because of the low power requirements, it can be powered off a digital output pin from a microcontroller if desired. If that is done, keep in mind the 1 minute startup time, so it is generally best to just keep it always powered while in use.
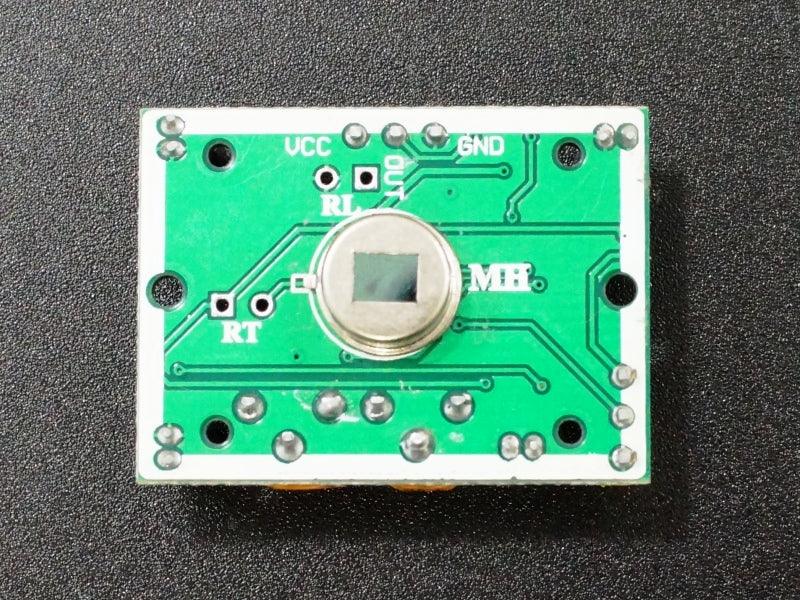
Module Connections
There is a 3-pin header on the assembly. The markings are hidden by the plastic dome, so refer to the picture for the pin-out. The dome can also be easily removed to see the markings.
1 x 3 Header
- VCC = Connect to 4.5V to 20V
- OUTPUT = Digital sensor output (active HIGH) – Normally connects to a digital input pin on a uC
- GND = Connect to system ground. This ground needs to be in common with the uC
OUR EVALUATION RESULTS:
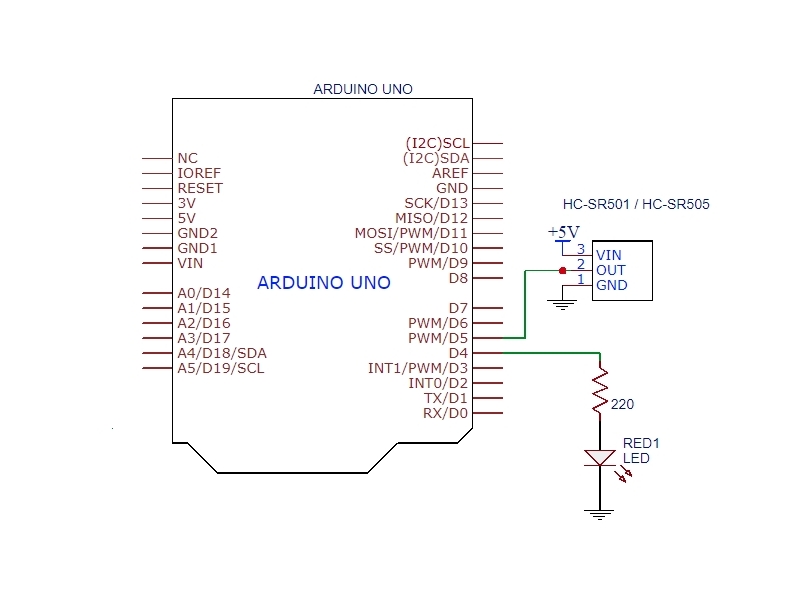
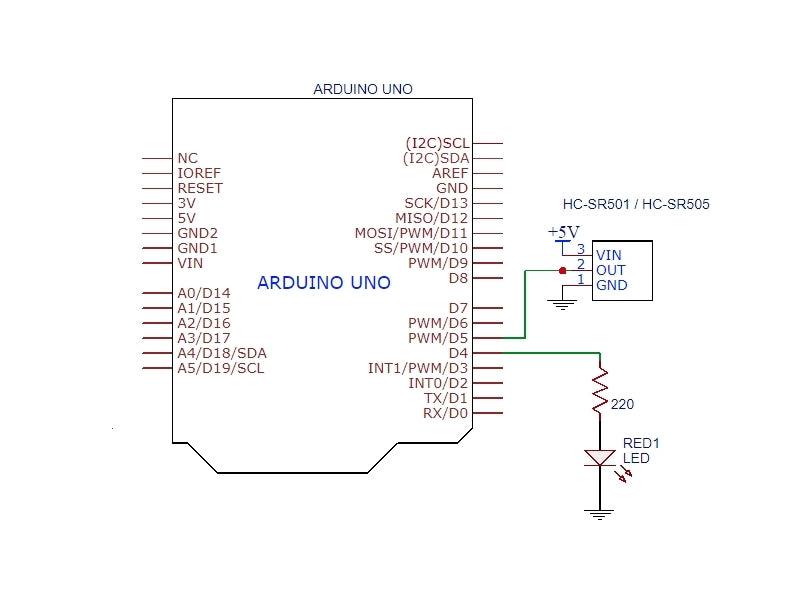
PIR Motion Sensor Test Setup
These modules work very well with good sensitivity and are fun to play with as there are a lot of creative things that they can be used for such as home burglar sensing, trail game camera sensor, to waking up animated Halloween props when trick-or-treaters come up the sidewalk. Important Note: Due to their lack of body heat, it will not work well for establishing a Zombie perimeter alarm.
For breadboard use since these have caps and jumpers on the bottom, it can be handy to use a stackable type F/M header to plug the module header into and then insert that into the breadboard. That allows the sensor to sit up straight and gives access to the jumper and pots.
The program below uses a simple state machine to monitor the state of the sensor. Basically it just checks on the state of the sensor attached to pin 4 and does something if it sees that the state has changed. In this case, we are just turning an LED on/off that is connected to pin 5 and also sending a status update to the Serial Monitor window. This basic state machine technique allows the microcontroller to be off doing other things in-between checking on the sensor rather than using the more common Delay() type of technique between reading the sensor which blocks all other activity.
The LED is helpful as a visual indicator when wandering around to see how the detection works. As usual, you will need to insert a 220 ohm or so current limiting resistor between the Arduino and the LED to keep everyone happy.
HC-SR501 PIR Motion Sensor Module Test Program
/* HC-SR501 PIR Motion Sensor Module Test Basic code for monitoring the output of the sensor and reporting the results to the Serial Monitor and by turning an LED on/off. We hook the sensor pin up to pin 5 and the LED anode to pin 4. The LED cathode should go to ground via a current limiting resistor. */ int const SENSOR_PIN = 5; // Use any available digital pins int const LED_PIN = 4; int state = 0; // Current state of the sensor int lastState = 0; // Last state of the sensor //=============================================================================== // Initialization //=============================================================================== void setup() { pinMode (LED_PIN, OUTPUT); // Define LED pin as an output Serial.begin (9600); // Set output window comm rate } //=============================================================================== // Main //=============================================================================== void loop() { state = digitalRead (SENSOR_PIN); // Read the current state of the sensor if (state != lastState) // State has changed { digitalWrite(LED_PIN, state); // Update the LED with current state Serial.print ("Current State: "); // Printout new state Serial.println (state); lastState = state; // Remember last state we were in } }
The board has a 2 small holes that can be used for mounting if desired. An optional acrylic mounting bracket is available below.
BEFORE THEY ARE SHIPPED, THESE MODULES ARE:
- Sample inspected and tested per incoming shipment
Notes:
- Active circuitry is on the back of the module, so care should be used to avoid possible electrical shorts or damage to the caps.
TECHNICAL SPECIFICATIONS
| Maximum Ratings | ||
| Vcc | 4.5 – 20V (5V typical) | |
| IMax | Maximum Current Draw | < 2mA |
| Operating Ratings | ||
| Time Delay | ~ 1 sec to 3 min | |
| Detection Distance | 3 – 7 meters (9 – 21 feet) | |
| Detection Angle | 120 degrees (typical) | |
| Dimensions | L x W x H | 33 x 25mm (1.3 x 1 x 1″) |
| Country of Origin | China | |
| Datasheets | PIR600B Sensor | |
| BISS0001 PIR Controller |







