







L293D V1 Motor Driver Shield for Arduino — 4 DC / 2 Stepper Motors
L293D V1 Motor Driver Shield for Arduino 4 DC / 2 Stepper Motors
Compatible JST cables for sensors and modules — secure & reliable. Shop now.

Couldn't load pickup availability
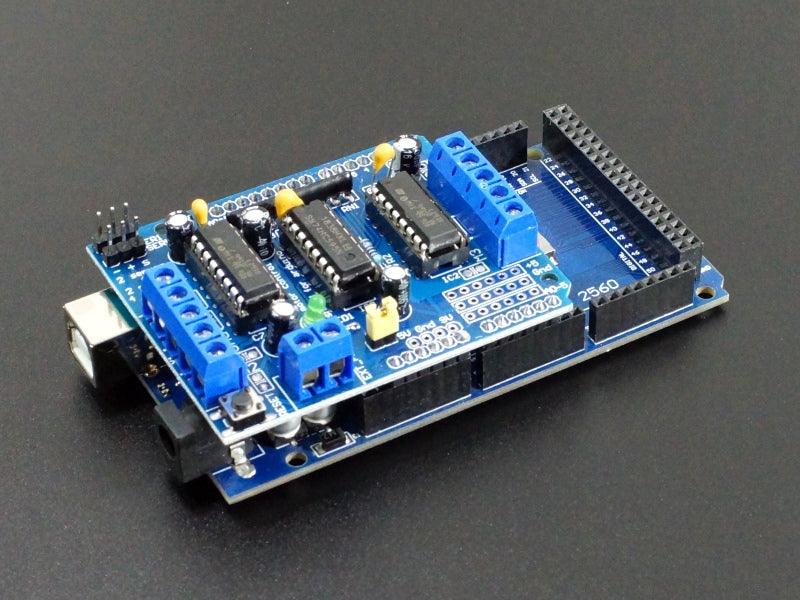
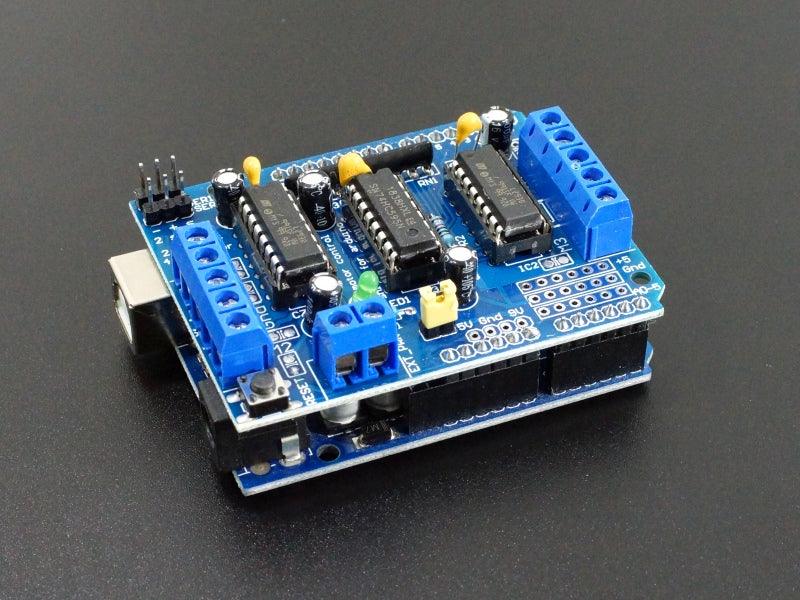
L293D V1 Motor Driver Shield for Arduino — 4 DC / 2 Stepper Motors
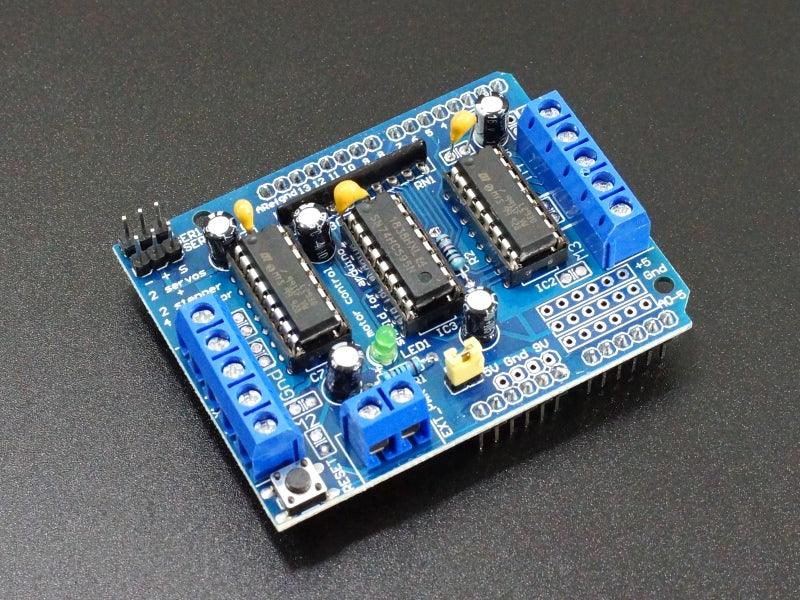
The L293D motor driver shield stacks directly onto Arduino Uno or Mega and enables control of up to 4 DC motors or 2 stepper motors (or a combination). Uses two L293D H-bridge driver ICs with built-in flyback diodes for motor protection. Controlled via I2C using the Adafruit Motor Shield library, freeing up Arduino digital pins.
Key Specifications
- Driver IC: L293D ×2 | Channels: 4 DC motor or 2 stepper motor
- Current: 0.6A per channel (1.2A peak) | Motor voltage: 4.5–25V
- Interface: I2C (74HC595 shift register)
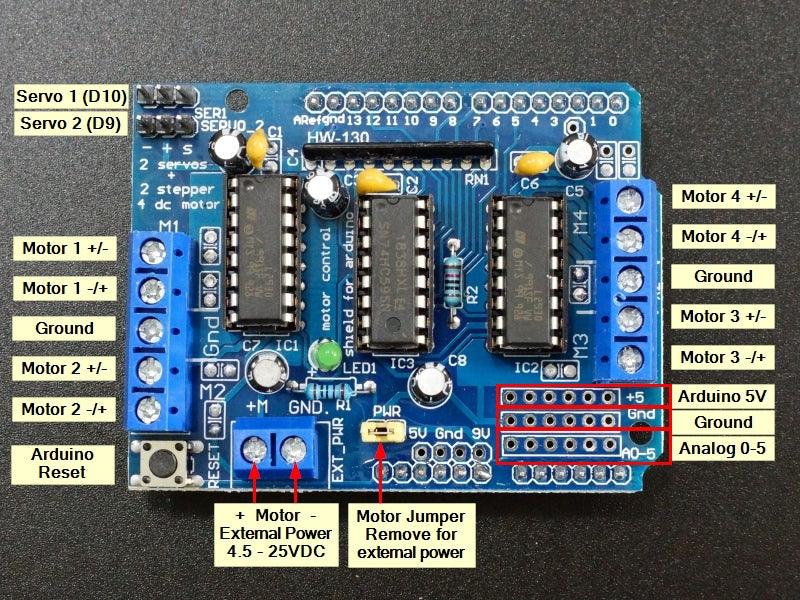
- Servo headers: 2× servo PWM headers
- Compatible: Arduino Uno / Mega
- Library: Adafruit Motor Shield V1 | Compliance: RoHS compliant
Why Choose This?
- ✅ 4 DC or 2 stepper motors — versatile motor control in one shield
- ✅ Built-in flyback diodes — protects Arduino from motor back-EMF
- ✅ I2C control — frees up Arduino digital pins for other uses
- ✅ Adafruit library compatible — extensive tutorials and community support
Typical Applications
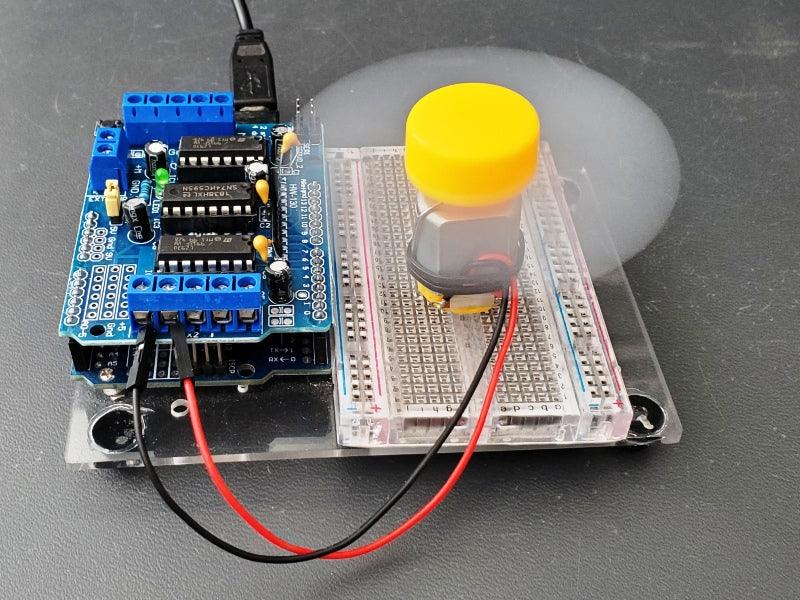
- Wheeled robot and rover motor control
- Stepper motor positioning projects
- Arduino robotics learning projects
- Conveyor and automation motor control

Blog posts
View all-

IC Chips & Discrete Components Express Shipping...
Shipping IC chips and discrete electronic components internationally requires more than choosing a carrier. ESD-safe packaging, correct HS codes, accurate customs declarations, and carrier selection for your destination all determine...
IC Chips & Discrete Components Express Shipping...
Shipping IC chips and discrete electronic components internationally requires more than choosing a carrier. ESD-safe packaging, correct HS codes, accurate customs declarations, and carrier selection for your destination all determine...
-

From Prototype to Mass Production — How to Scal...
Scaling from prototype to mass production is the most critical transition in a hardware product's lifecycle. The sourcing strategy that works for 10 prototype boards — cut tape, spot pricing,...
From Prototype to Mass Production — How to Scal...
Scaling from prototype to mass production is the most critical transition in a hardware product's lifecycle. The sourcing strategy that works for 10 prototype boards — cut tape, spot pricing,...
-

ISO 9001 Electronic Component Distributor — Wha...
ISO 9001:2015 certification is the most widely recognized quality management standard in the world — but what does it actually mean when an electronic component distributor claims to be ISO...
ISO 9001 Electronic Component Distributor — Wha...
ISO 9001:2015 certification is the most widely recognized quality management standard in the world — but what does it actually mean when an electronic component distributor claims to be ISO...


