




Romeo V2.2 All-in-One Robot Controller — Arduino Compatible
Romeo V2.2 All-in-One Robot Controller Arduino Compatible
Compatible JST cables for sensors and modules — secure & reliable. Shop now.

Couldn't load pickup availability
Romeo V2.2 All-in-One Robot Controller — Arduino Compatible
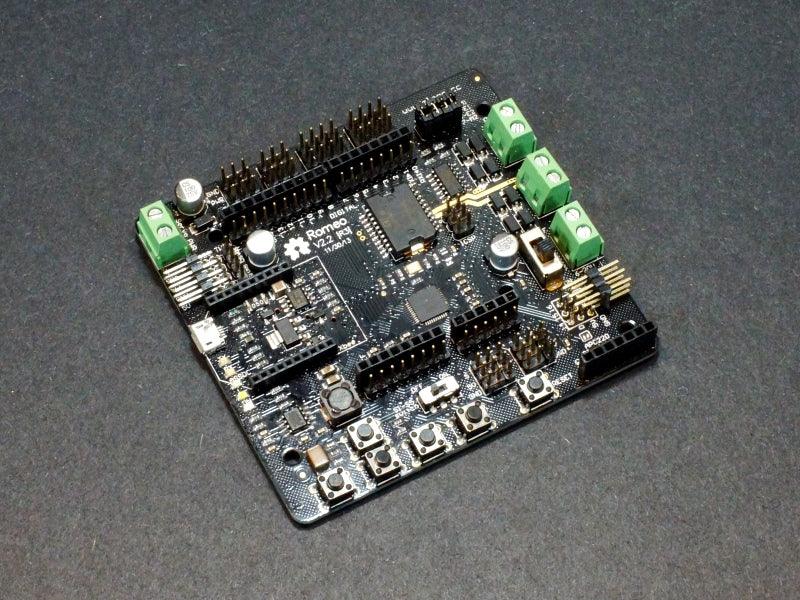
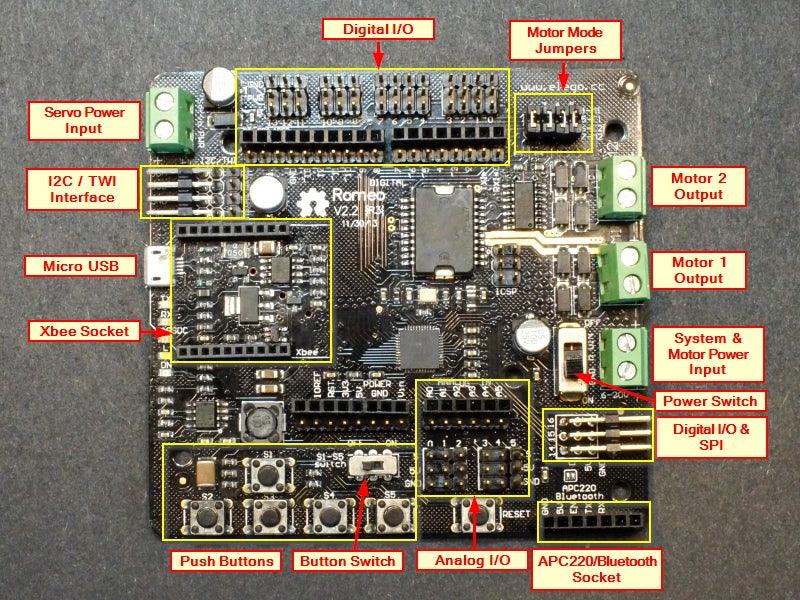
The Romeo V2.2 is an all-in-one Arduino-compatible robot controller that combines an Arduino Uno-compatible ATmega328P with a dual DC motor driver and servo headers on a single board. Eliminates the need for a separate motor shield, reducing wiring complexity and board stack height. Ideal for wheeled robots, robotic arms, and any project requiring motor control with Arduino.
Key Specifications
- MCU: ATmega328P | Clock: 16MHz | Voltage: 5V
- Flash: 32KB | SRAM: 2KB | EEPROM: 1KB
- Motor driver: Dual DC motor driver (on-board)
- Servo headers: Multiple servo PWM headers
- Digital I/O: 14 pins | Analog in: 8 channels
- USB: Micro USB (CH340) | IDE: Arduino IDE compatible
- Compliance: RoHS compliant
Why Choose This?
- ✅ All-in-one design — Arduino + motor driver on one board, no shield stacking needed
- ✅ Dual DC motor driver — drive two DC motors directly from the board
- ✅ Servo headers — connect servos directly without a separate servo shield
- ✅ Arduino IDE compatible — use all existing Arduino libraries
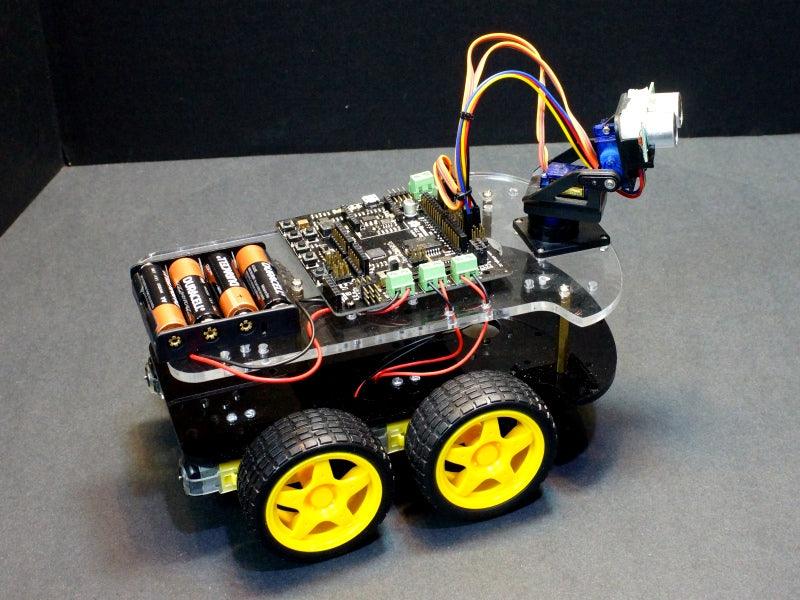
Typical Applications
- Wheeled robot and rover projects
- Robotic arm and gripper control
- Arduino motor control learning projects
- Compact robot controller for competitions

Blog posts
View all-

IC Chips & Discrete Components Express Shipping...
Shipping IC chips and discrete electronic components internationally requires more than choosing a carrier. ESD-safe packaging, correct HS codes, accurate customs declarations, and carrier selection for your destination all determine...
IC Chips & Discrete Components Express Shipping...
Shipping IC chips and discrete electronic components internationally requires more than choosing a carrier. ESD-safe packaging, correct HS codes, accurate customs declarations, and carrier selection for your destination all determine...
-

From Prototype to Mass Production — How to Scal...
Scaling from prototype to mass production is the most critical transition in a hardware product's lifecycle. The sourcing strategy that works for 10 prototype boards — cut tape, spot pricing,...
From Prototype to Mass Production — How to Scal...
Scaling from prototype to mass production is the most critical transition in a hardware product's lifecycle. The sourcing strategy that works for 10 prototype boards — cut tape, spot pricing,...
-

ISO 9001 Electronic Component Distributor — Wha...
ISO 9001:2015 certification is the most widely recognized quality management standard in the world — but what does it actually mean when an electronic component distributor claims to be ISO...
ISO 9001 Electronic Component Distributor — Wha...
ISO 9001:2015 certification is the most widely recognized quality management standard in the world — but what does it actually mean when an electronic component distributor claims to be ISO...


