Keszoox
TB6612FNG / DRV8833 Dual Motor Driver Module | 1.2A / 3.2A Peak | CW/CCW/Brake/Stop | Arduino Microcontroller
TB6612FNG / DRV8833 Dual Motor Driver Module | 1.2A / 3.2A Peak | CW/CCW/Brake/Stop | Arduino Microcontroller

Couldn't load pickup availability
TB6612FNG / DRV8833 Dual Motor Driver Module — 1.2A / 3.2A Peak | CW/CCW/Brake/Stop | Arduino
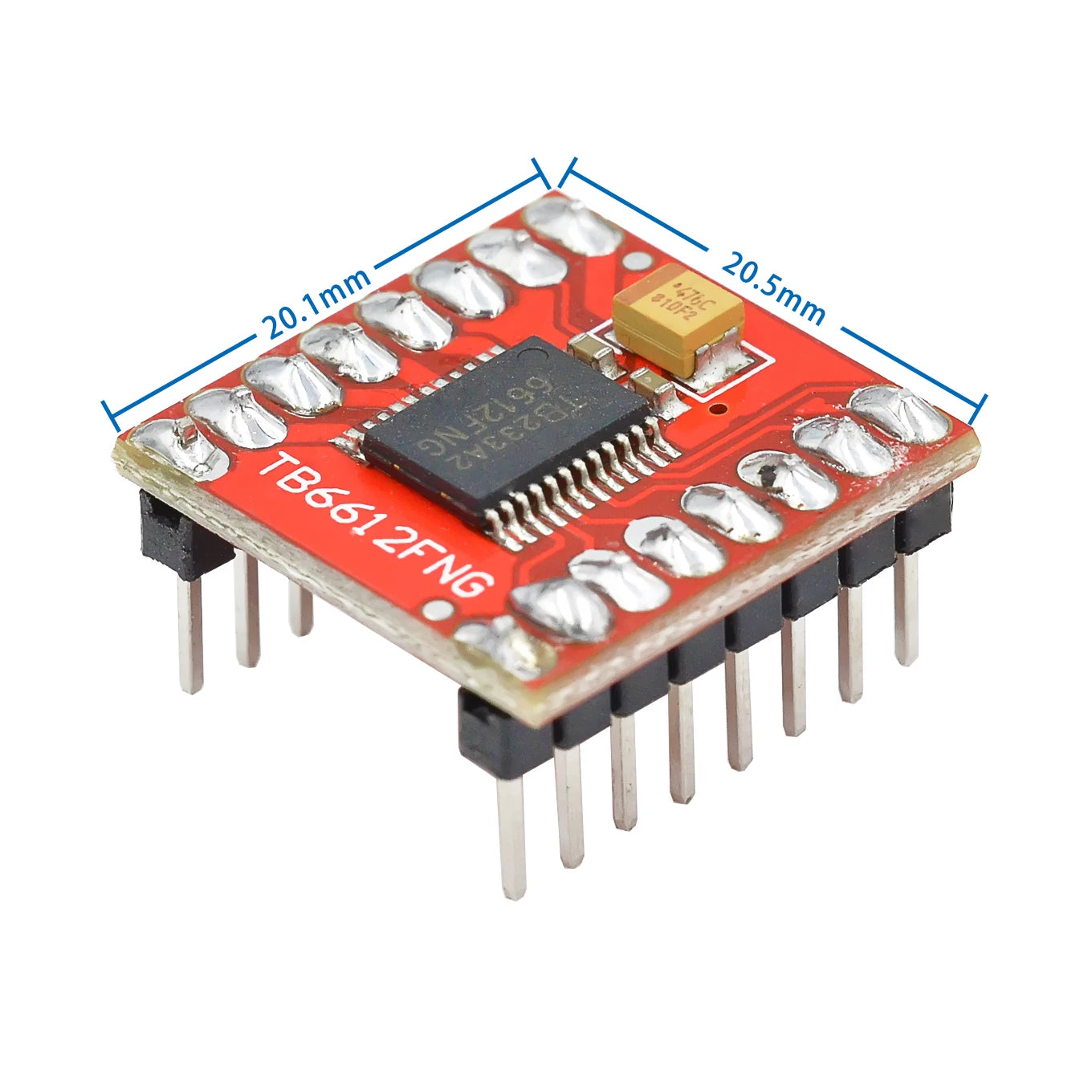
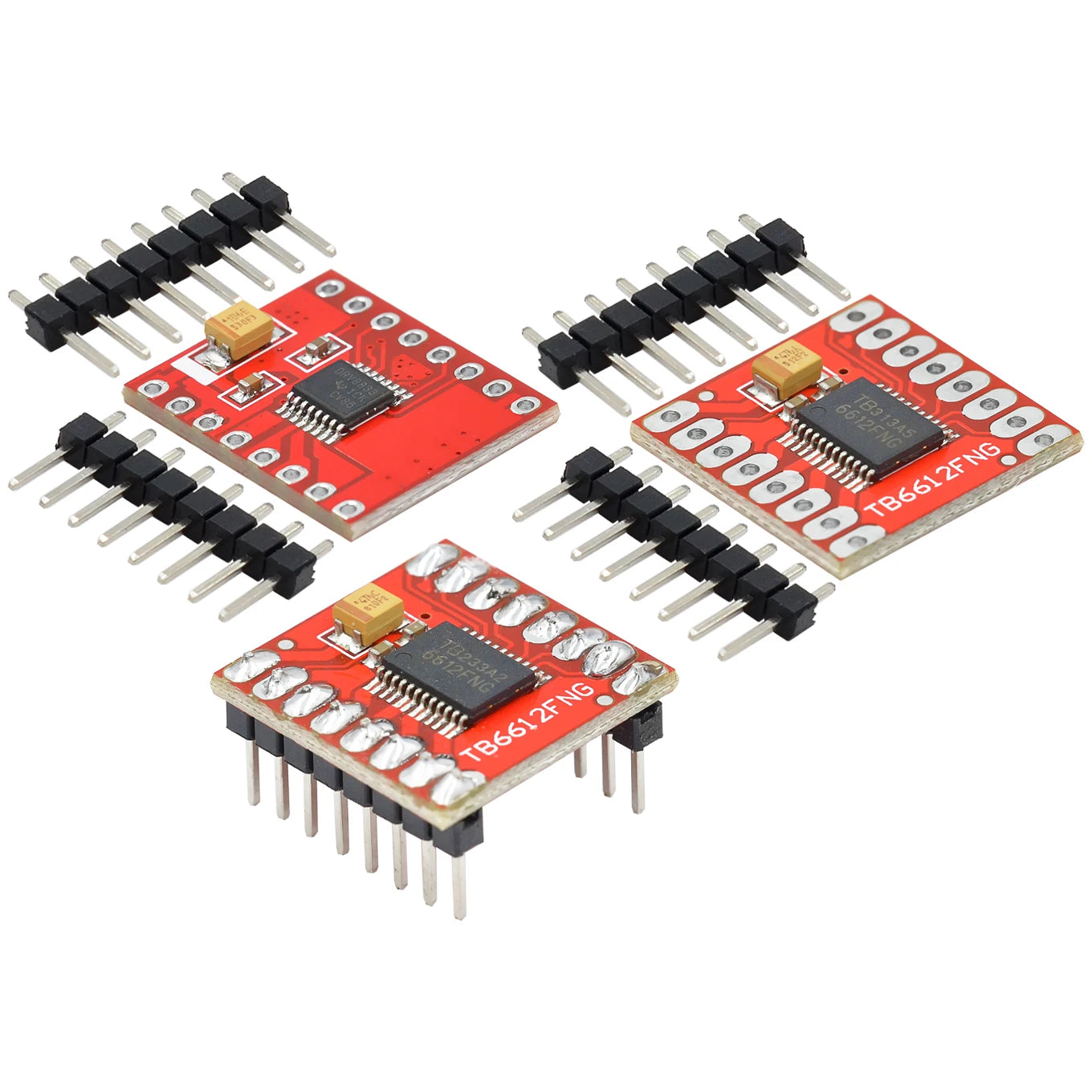
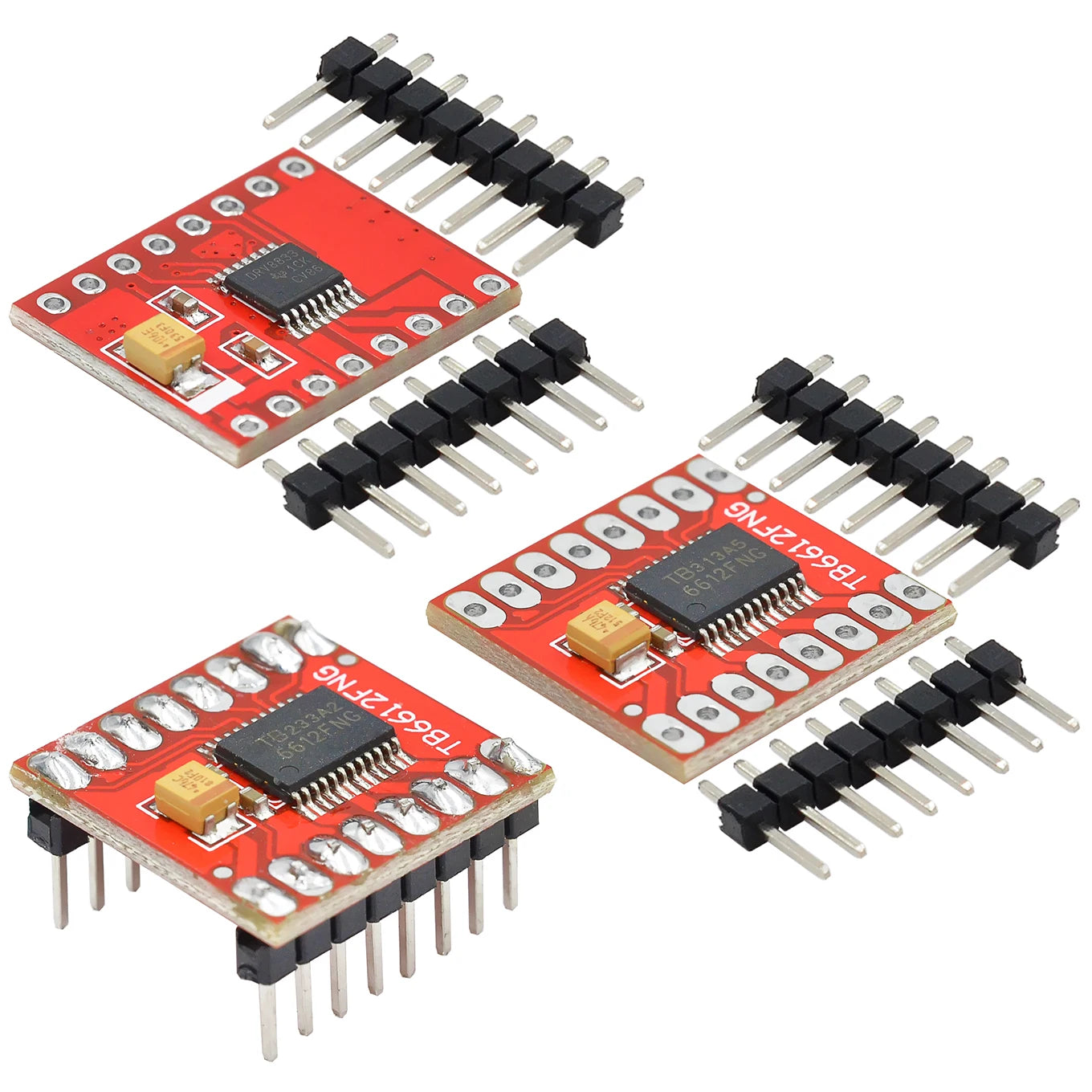
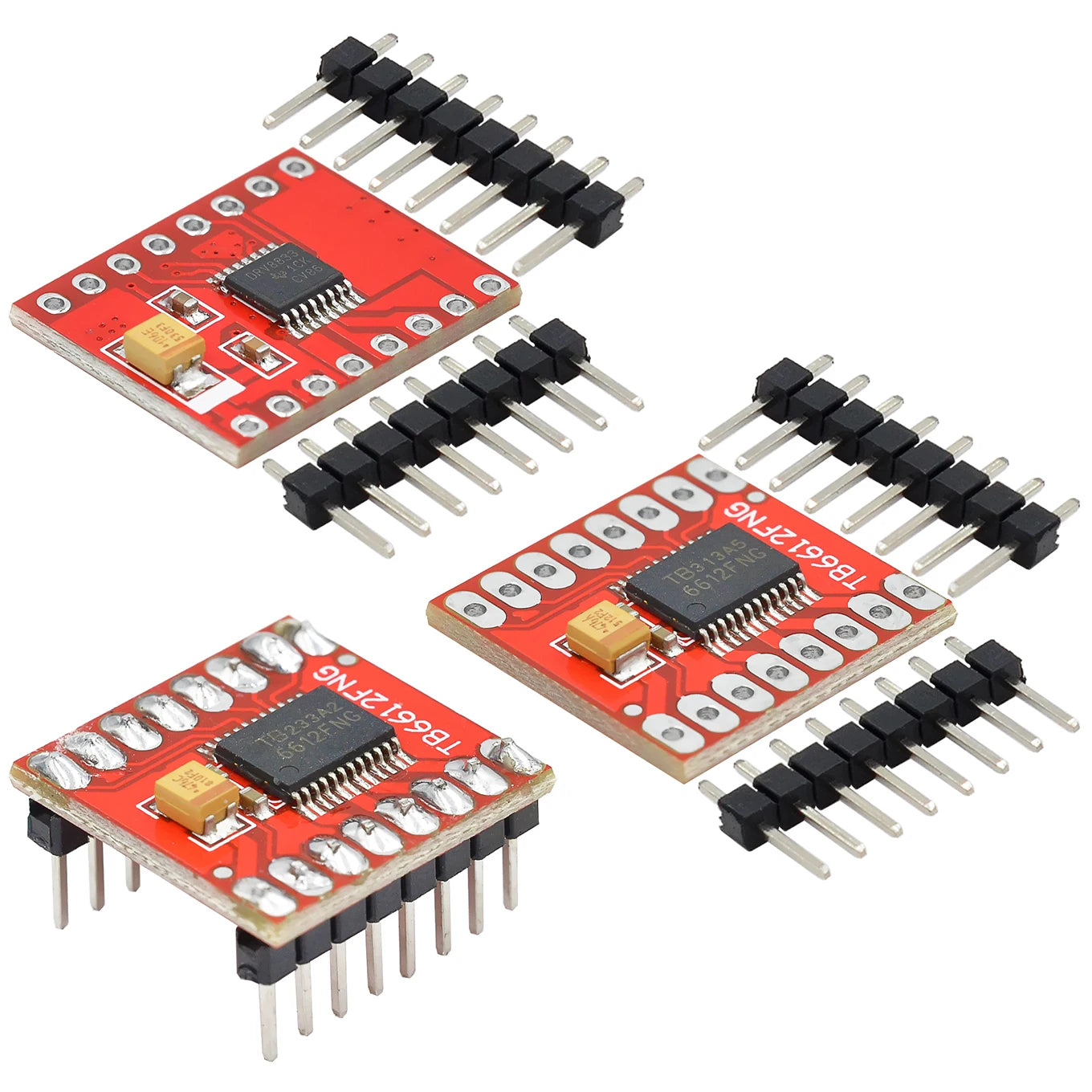
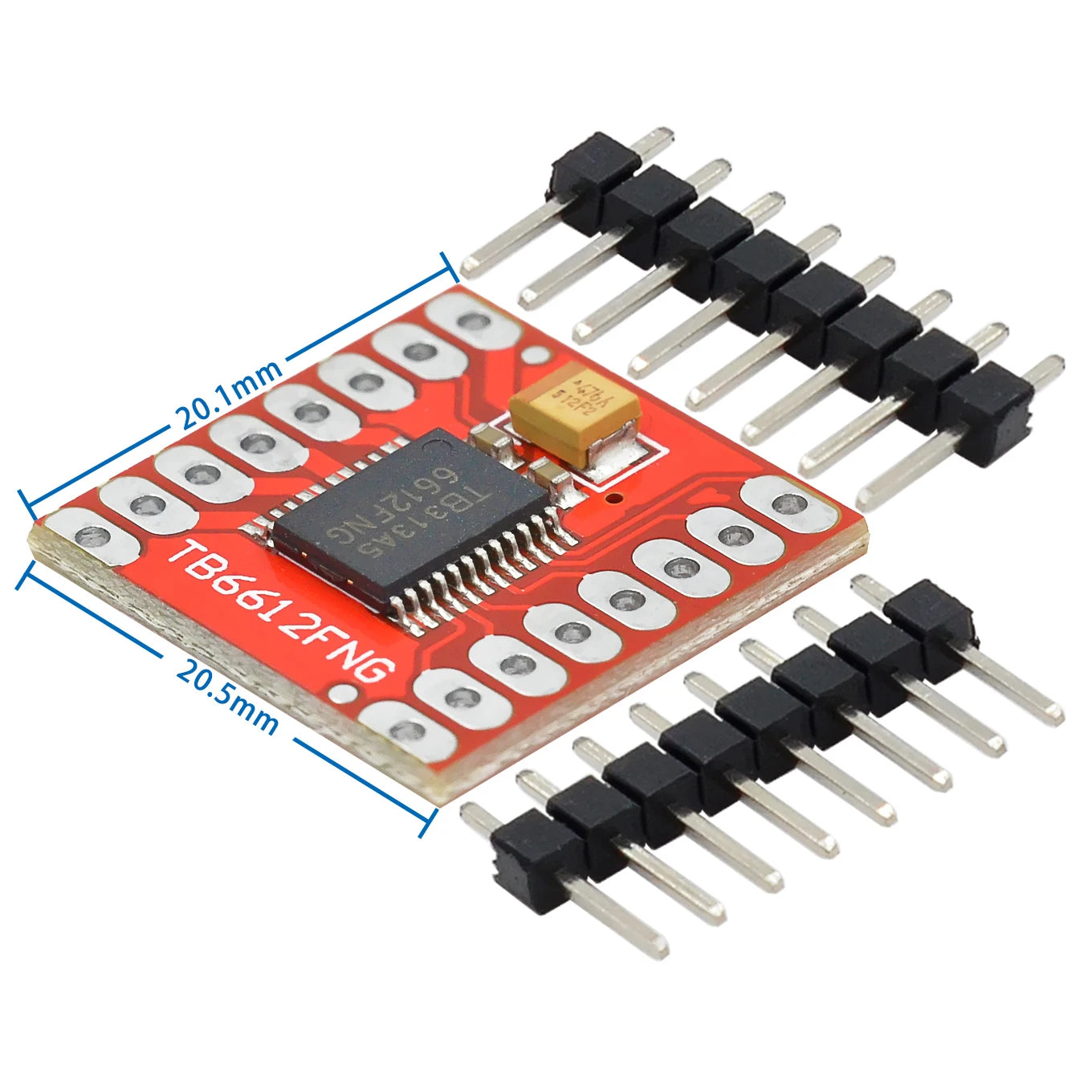
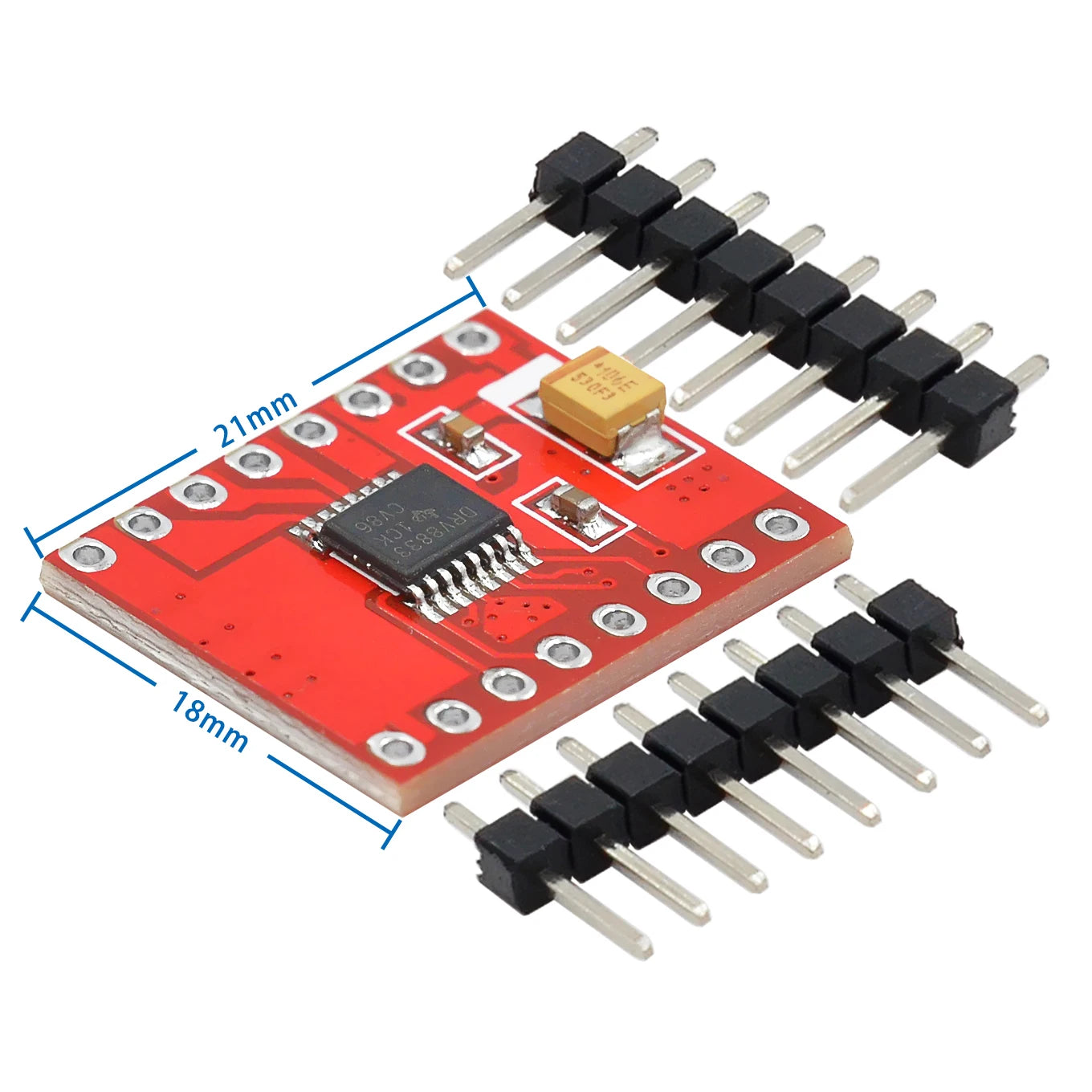
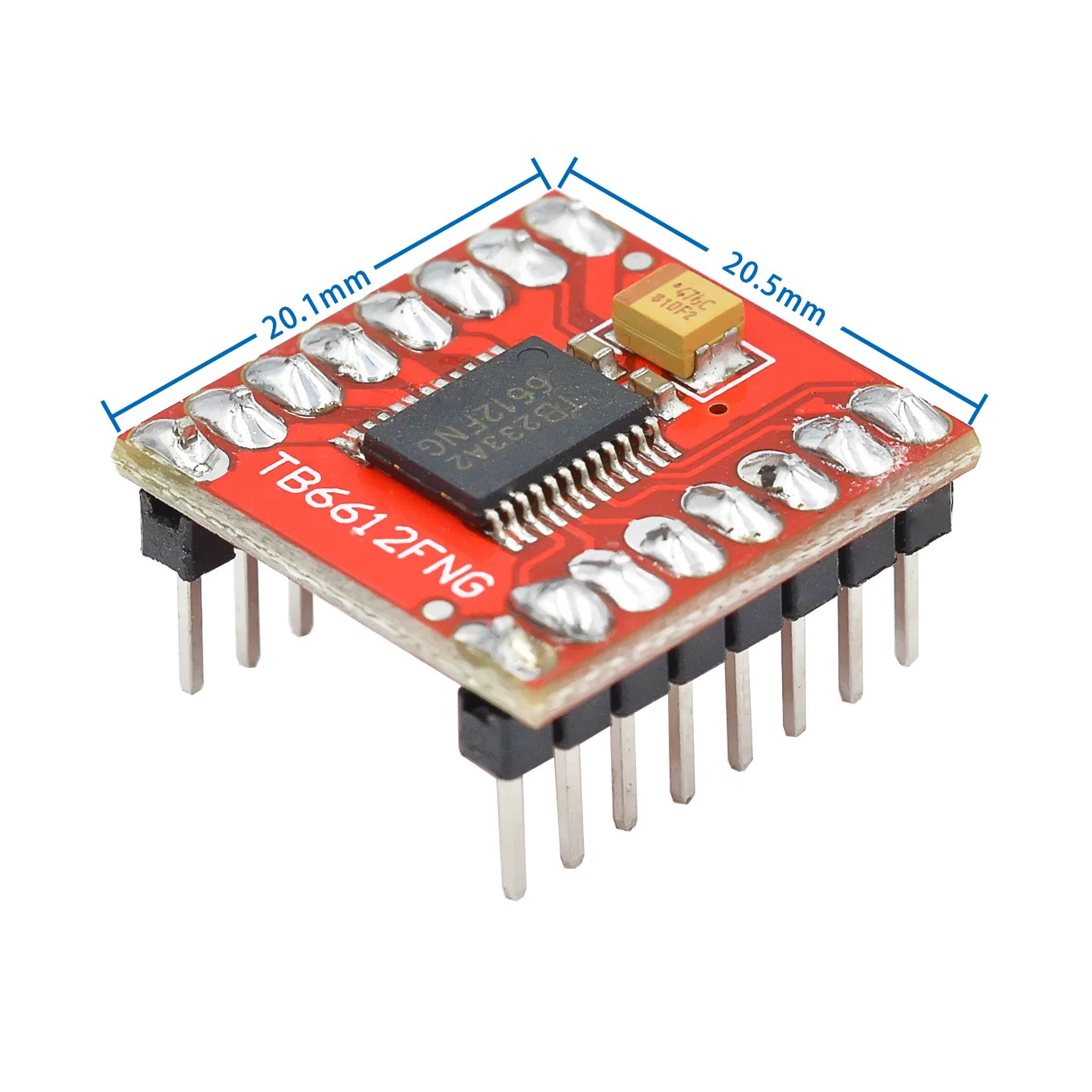
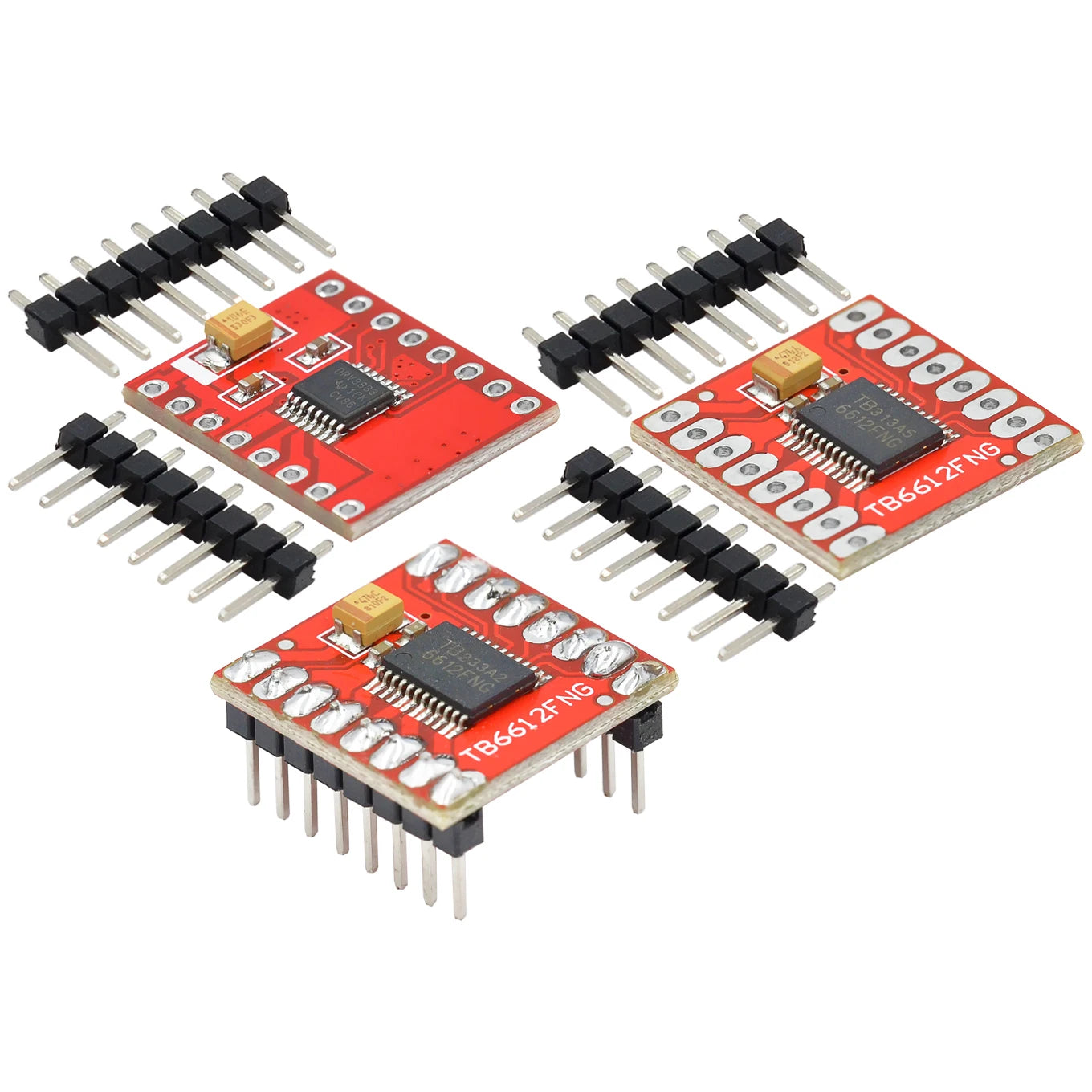
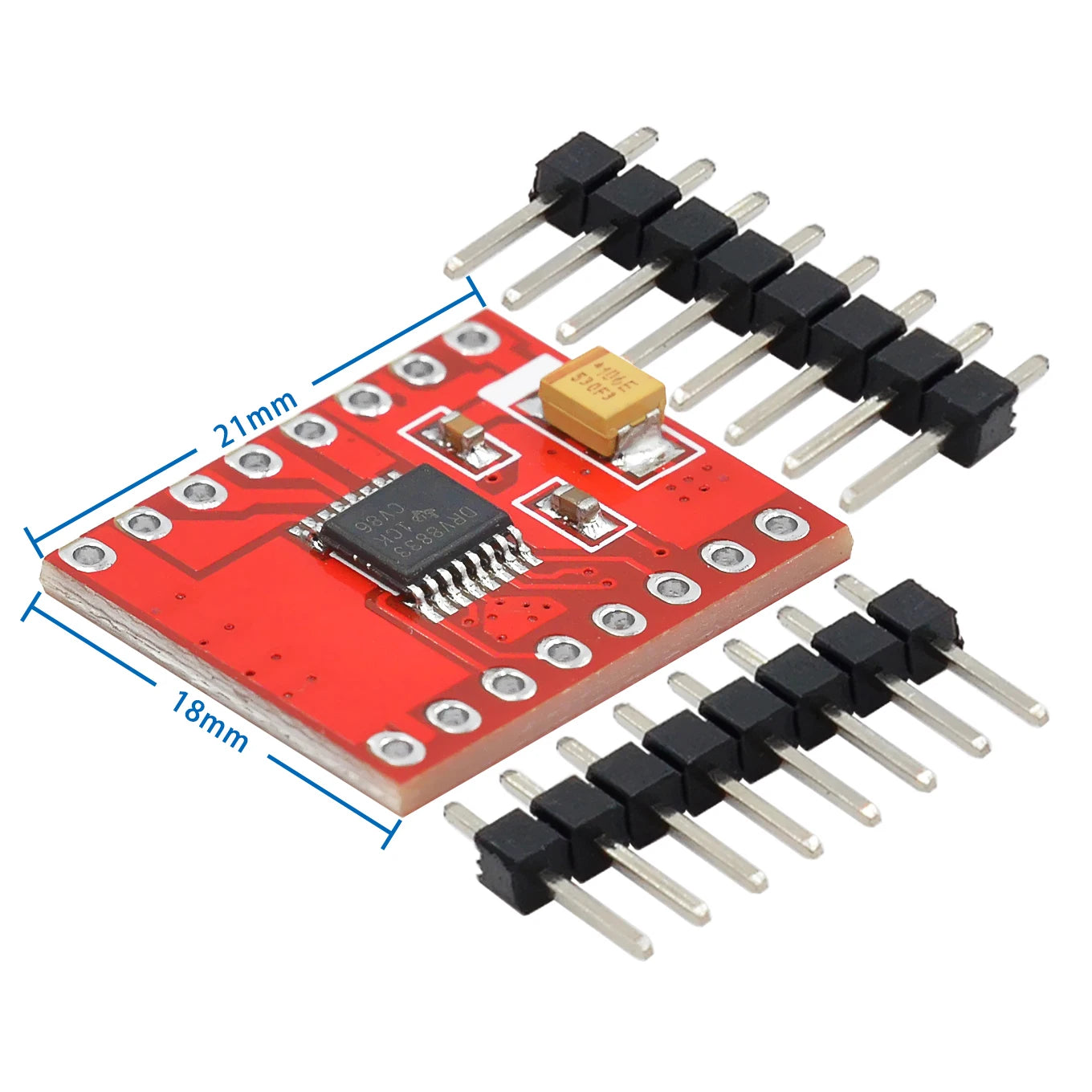
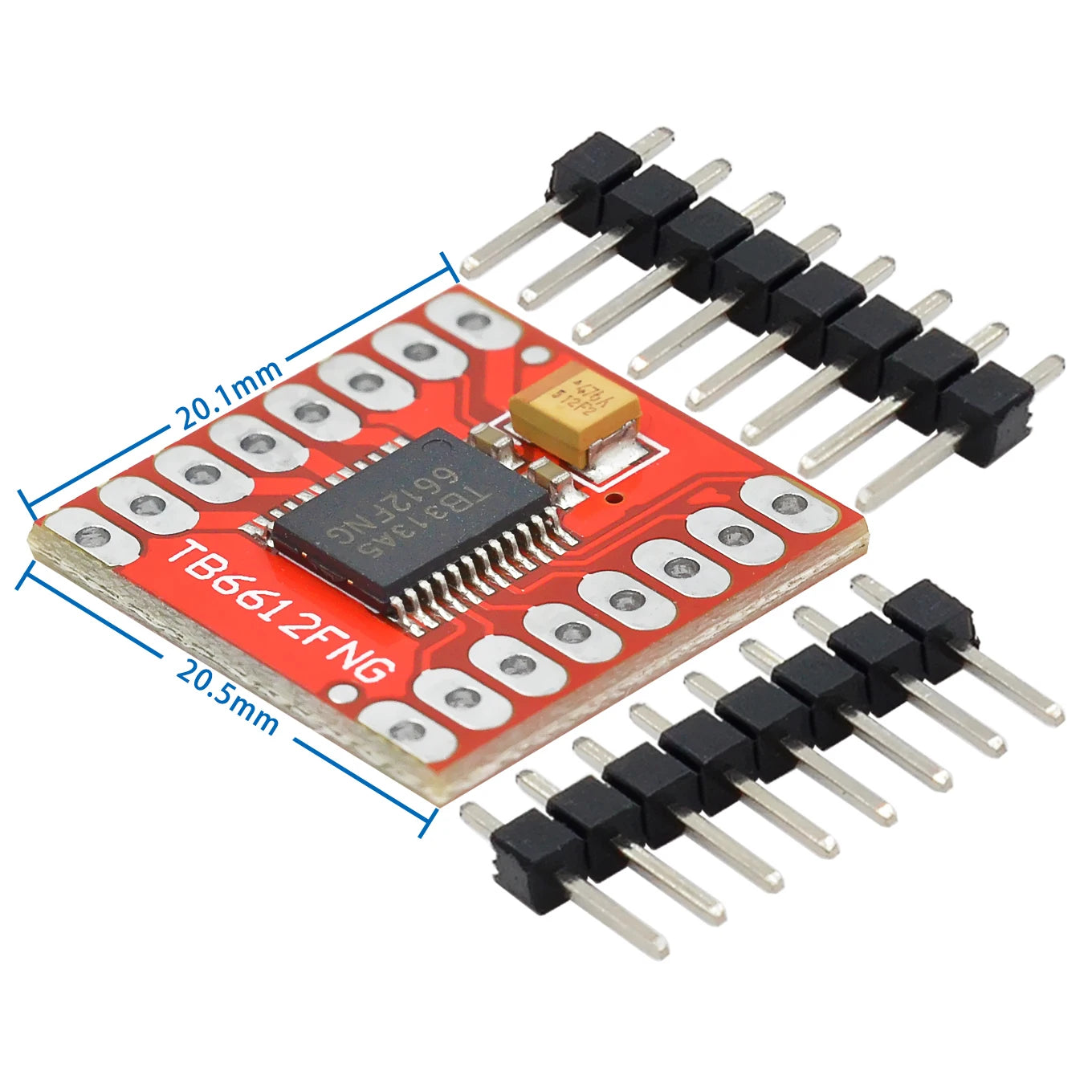
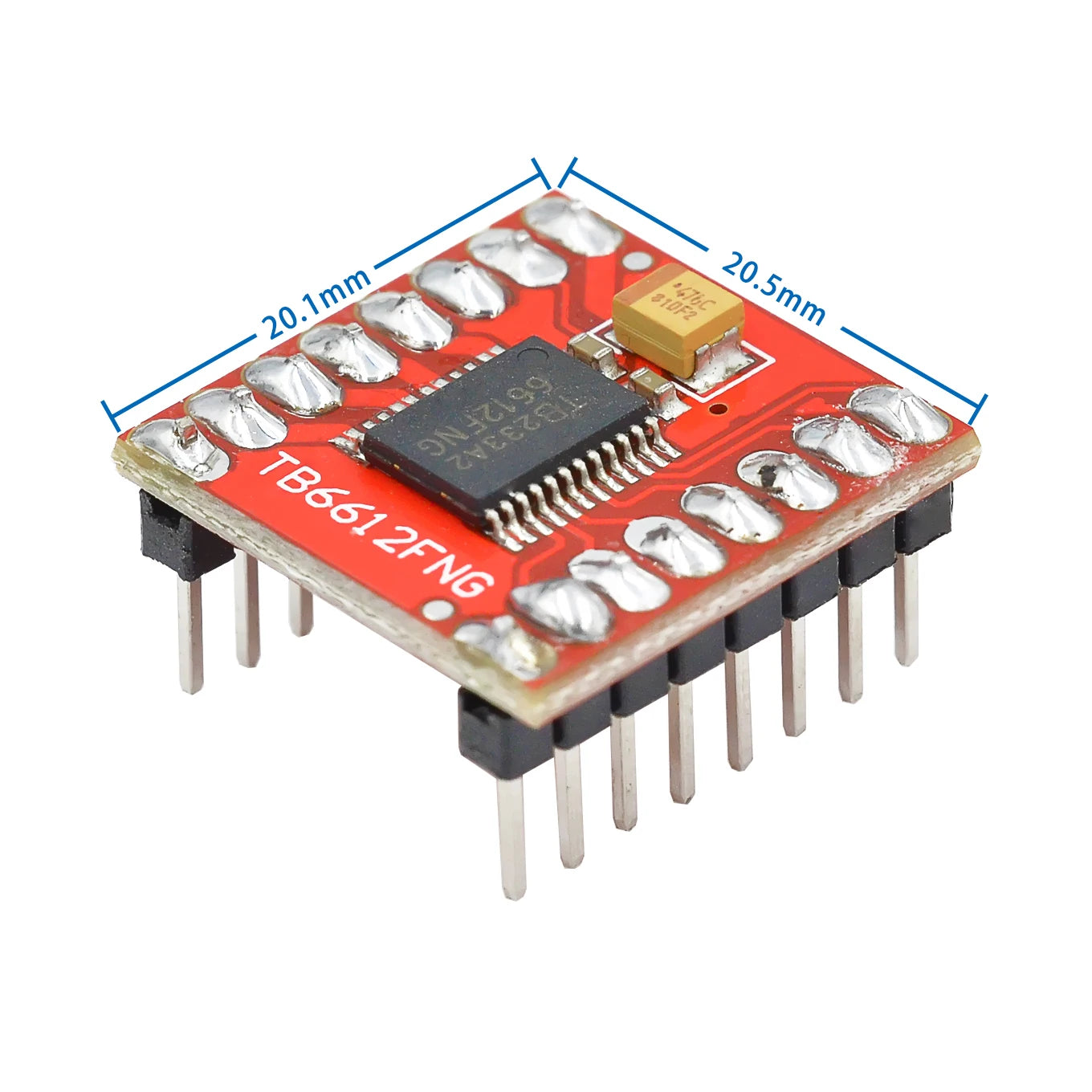
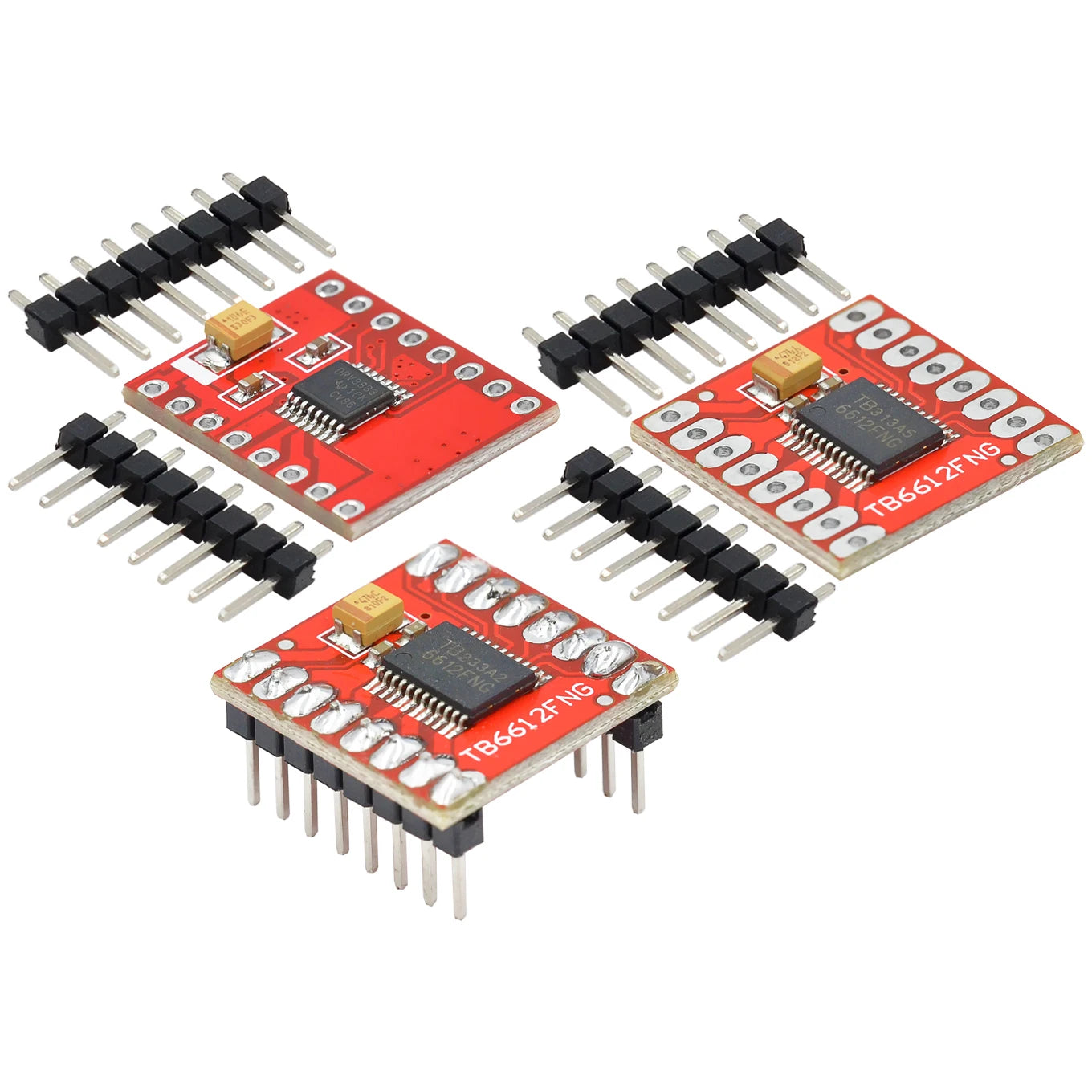
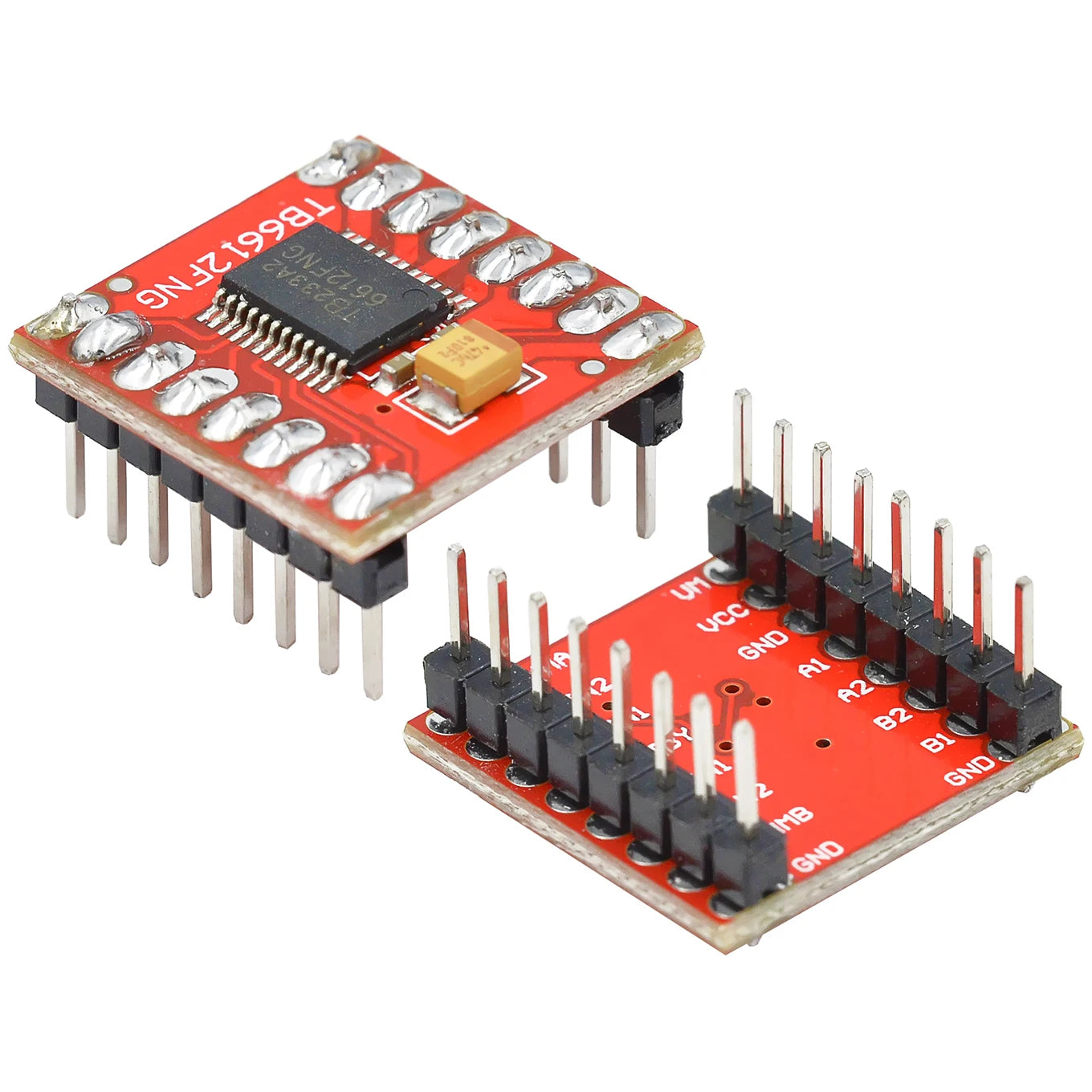
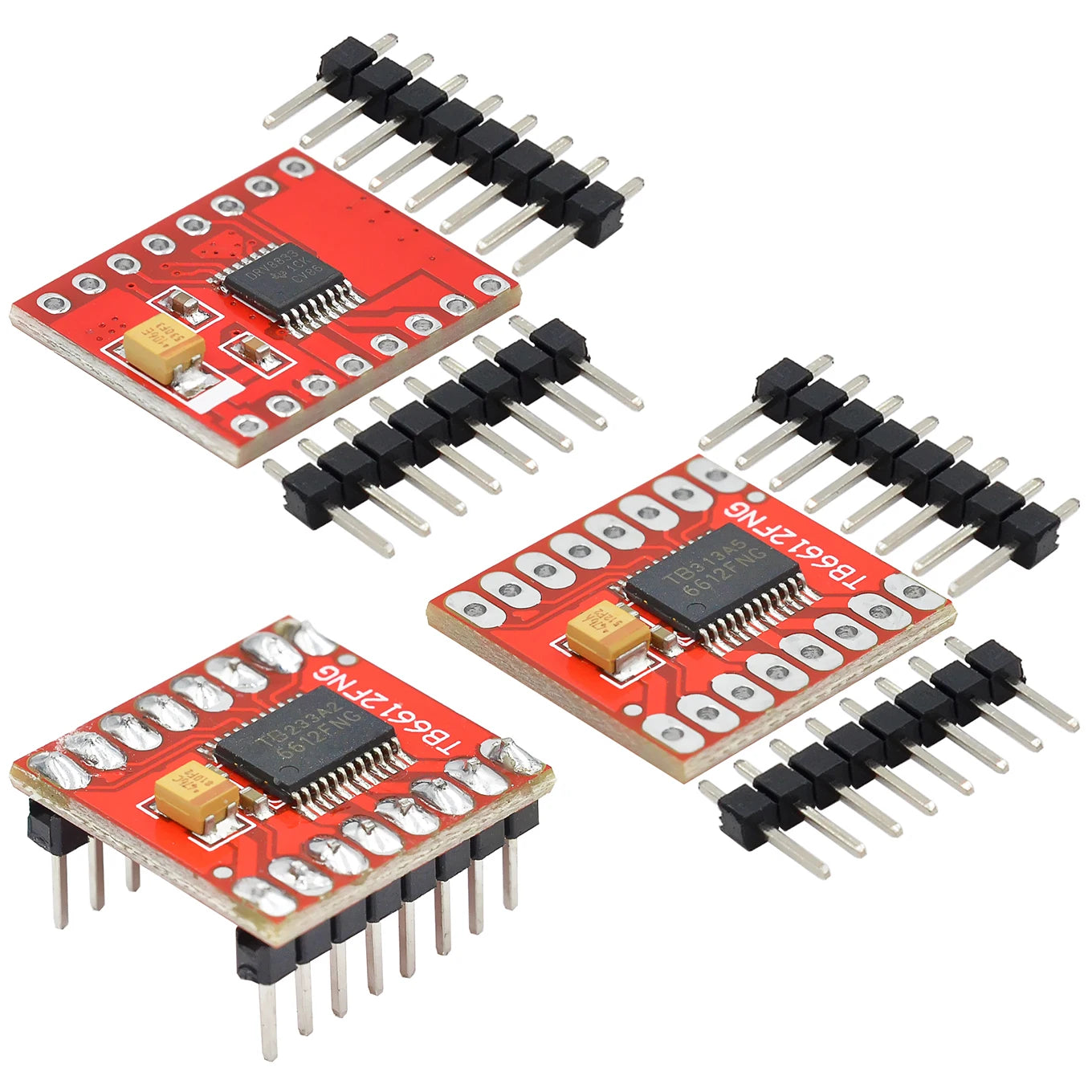
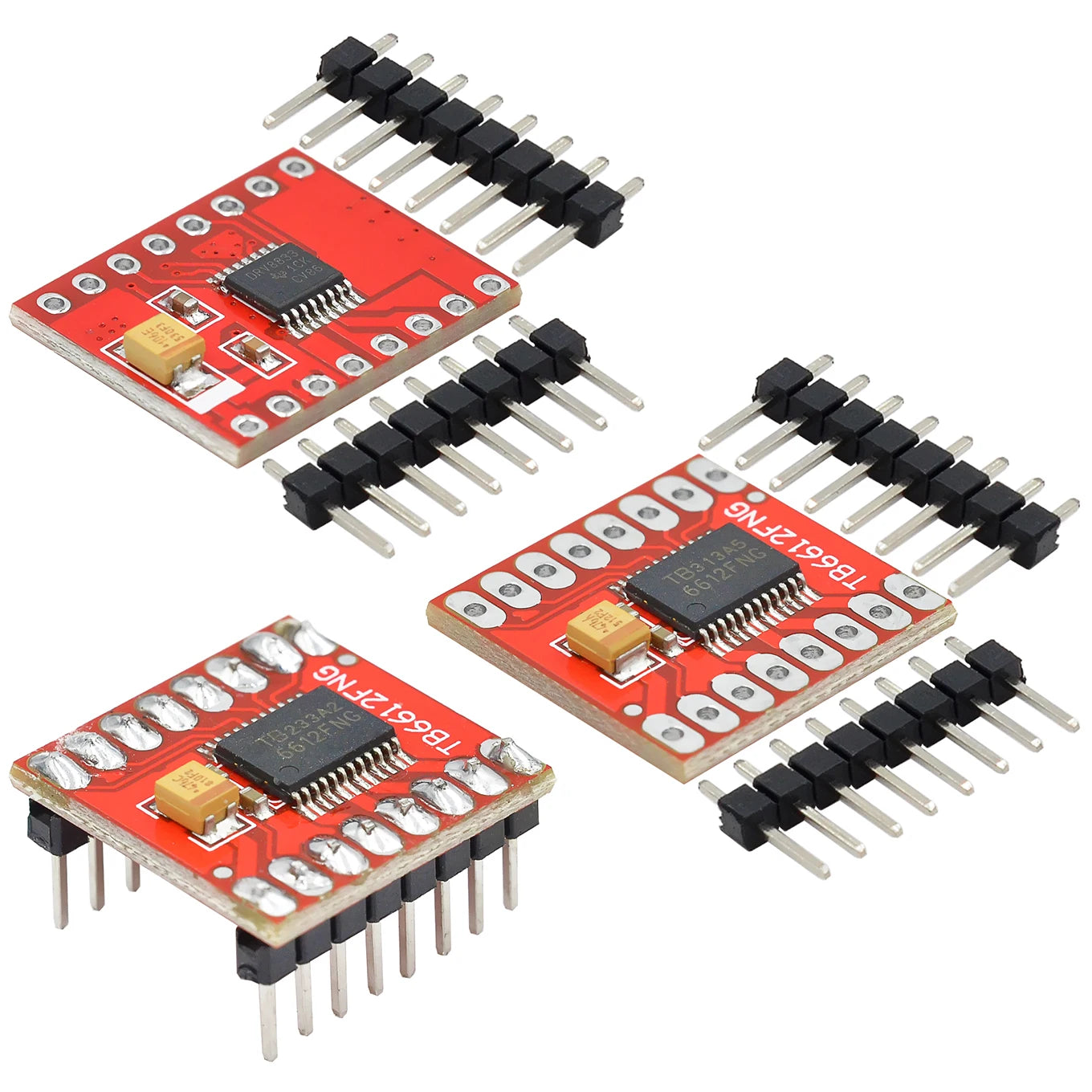
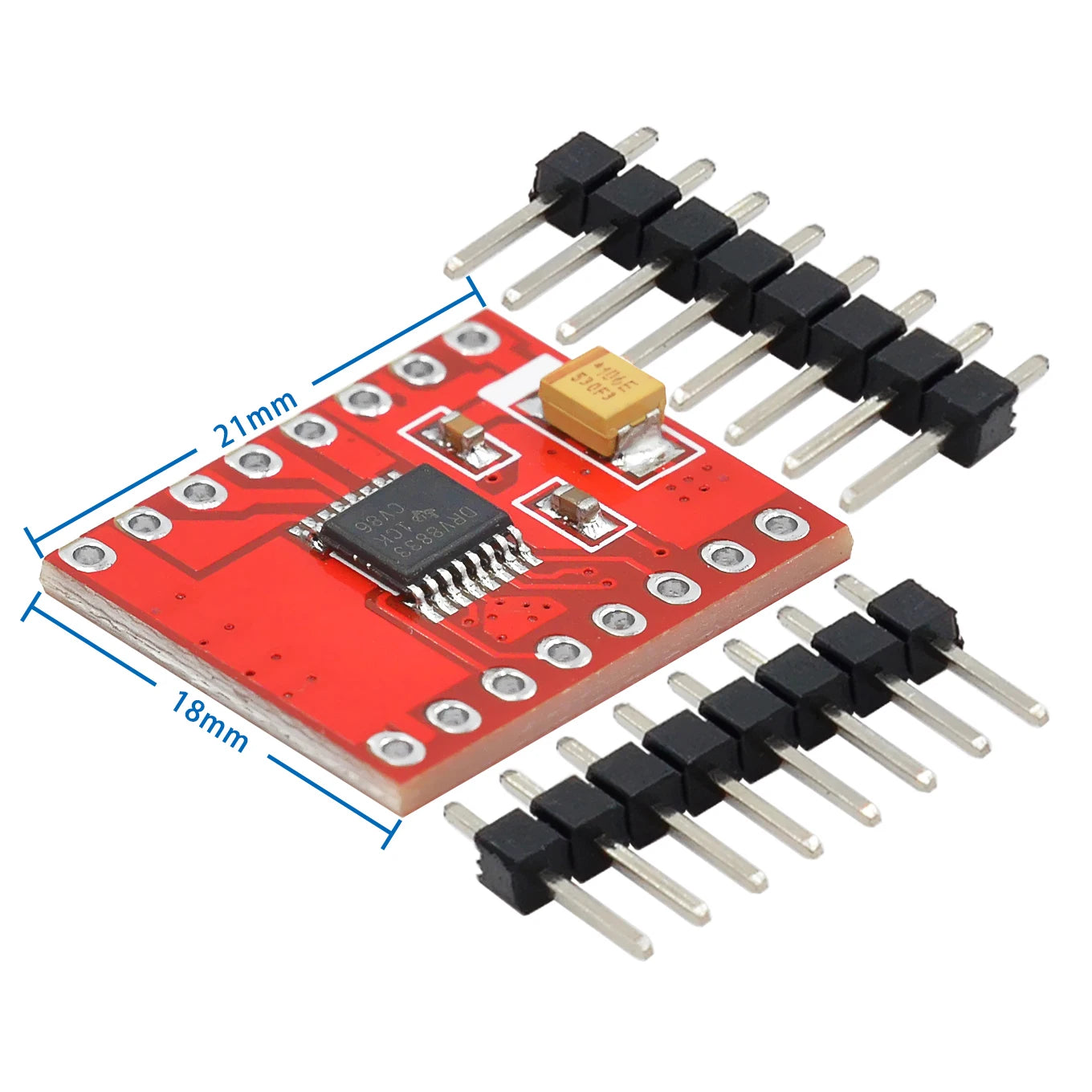
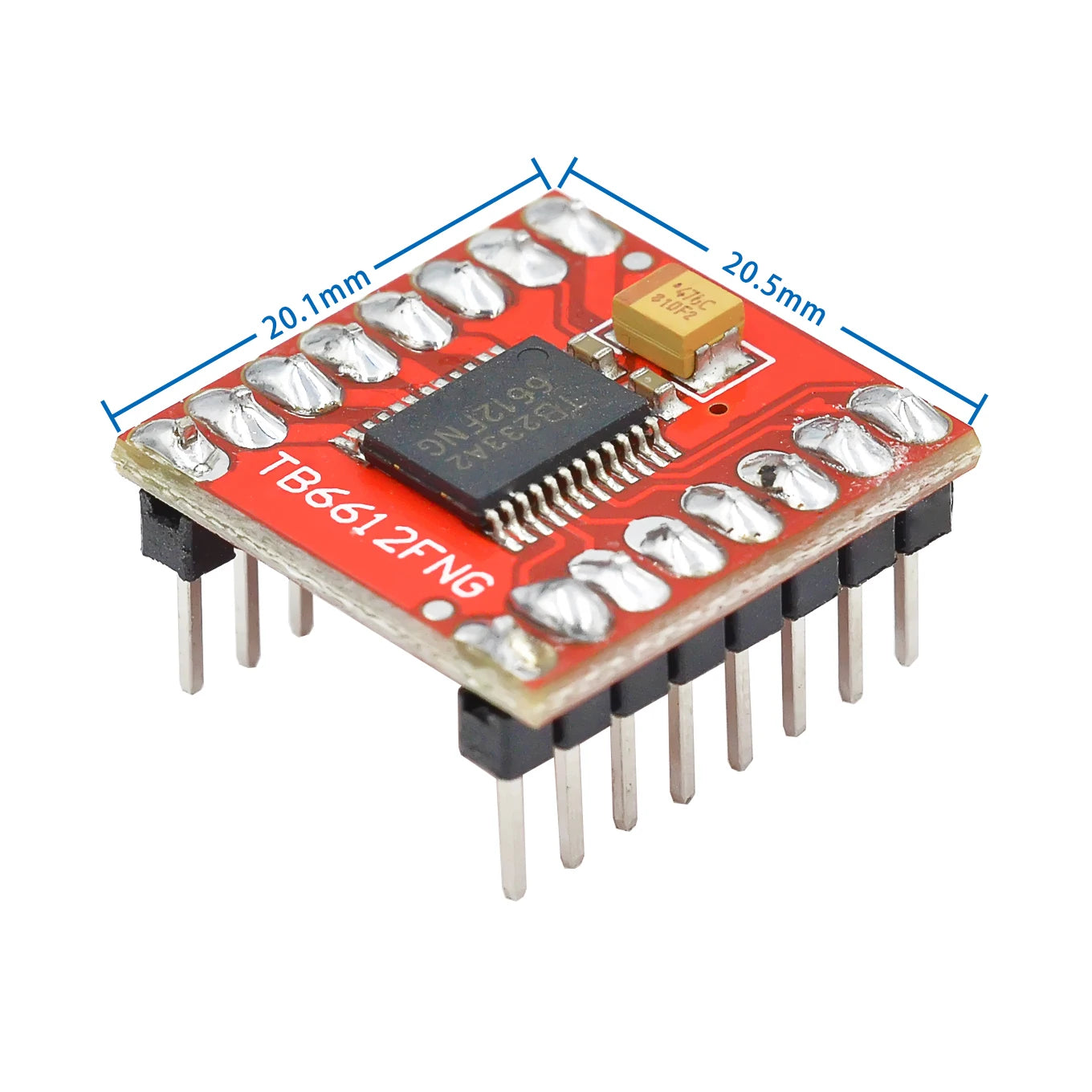
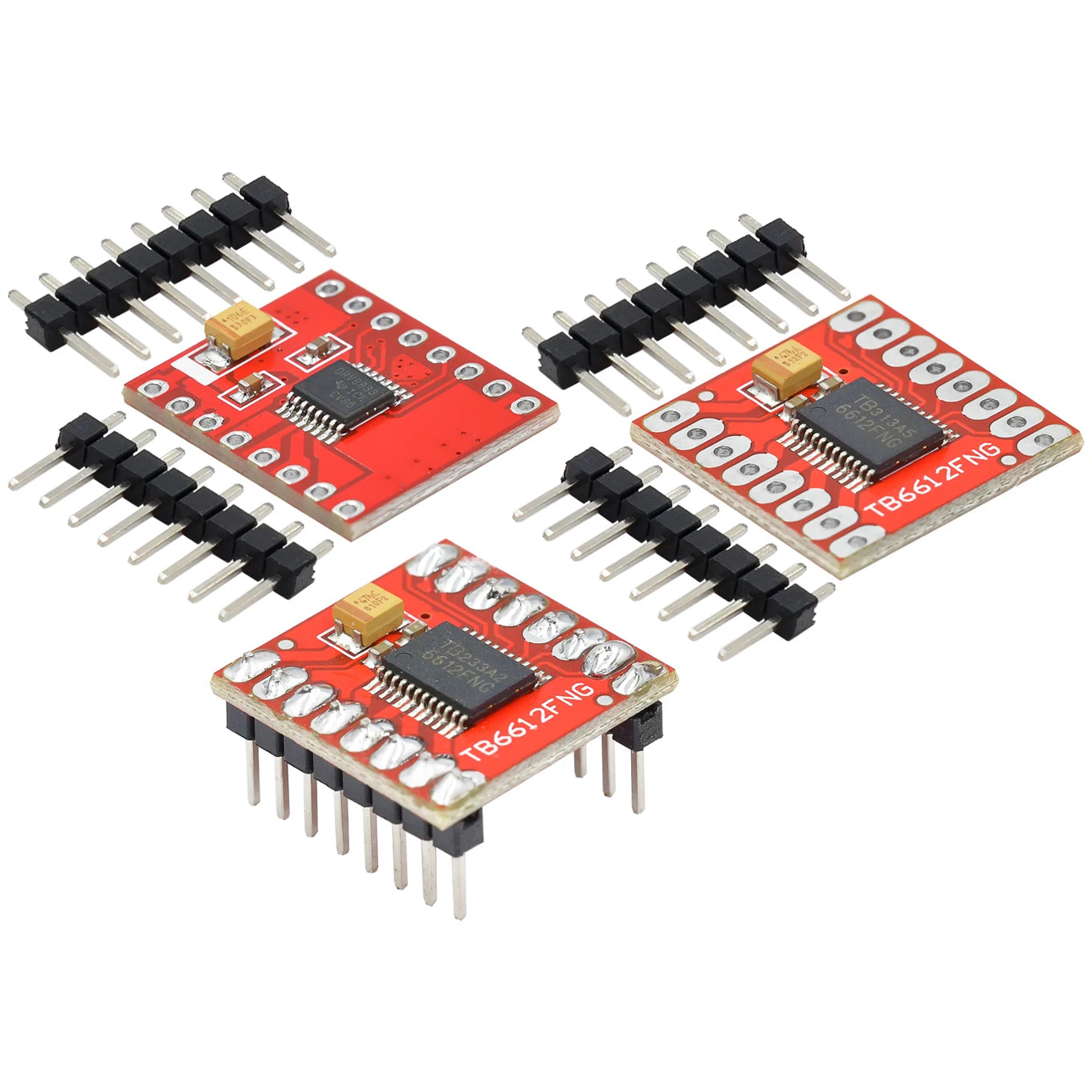
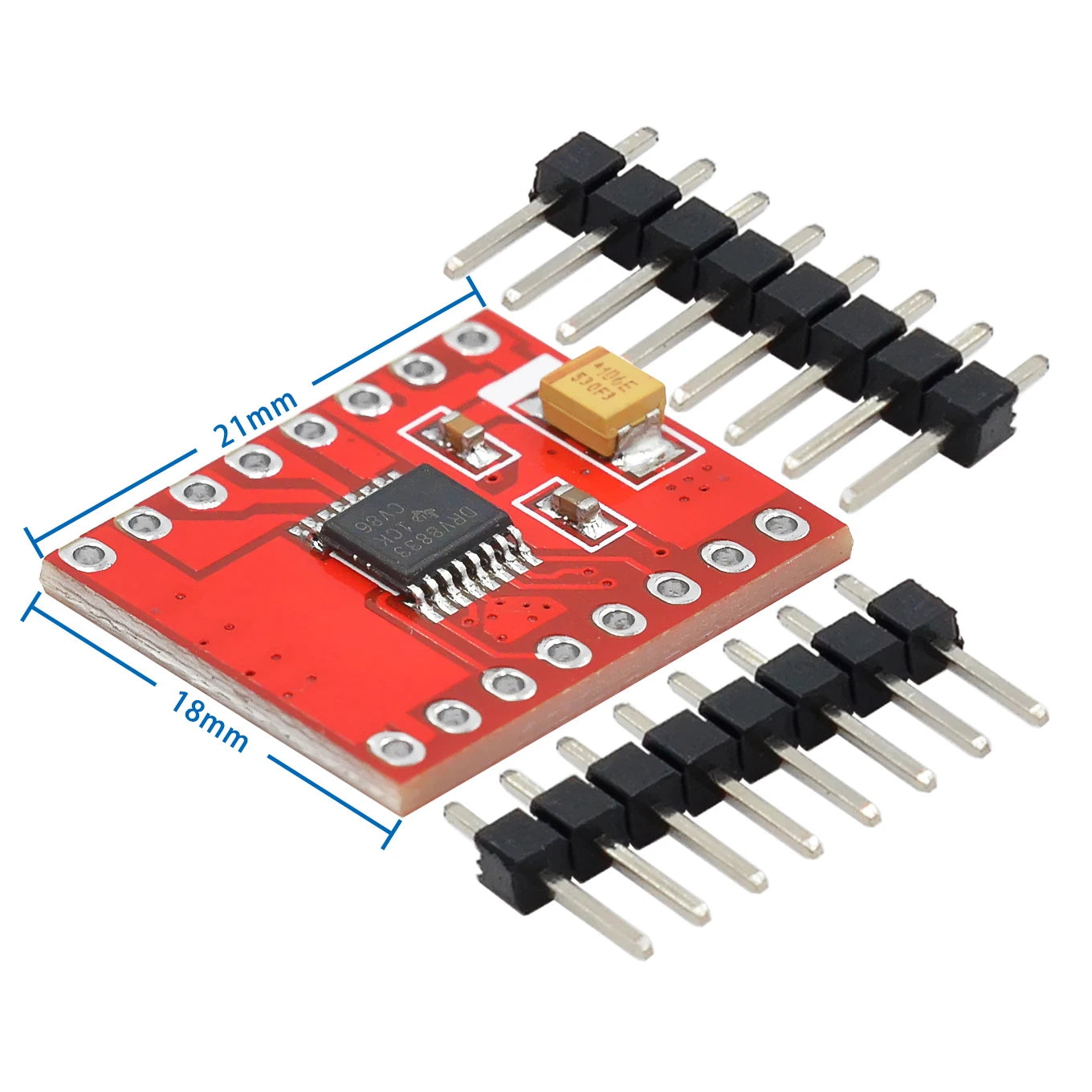
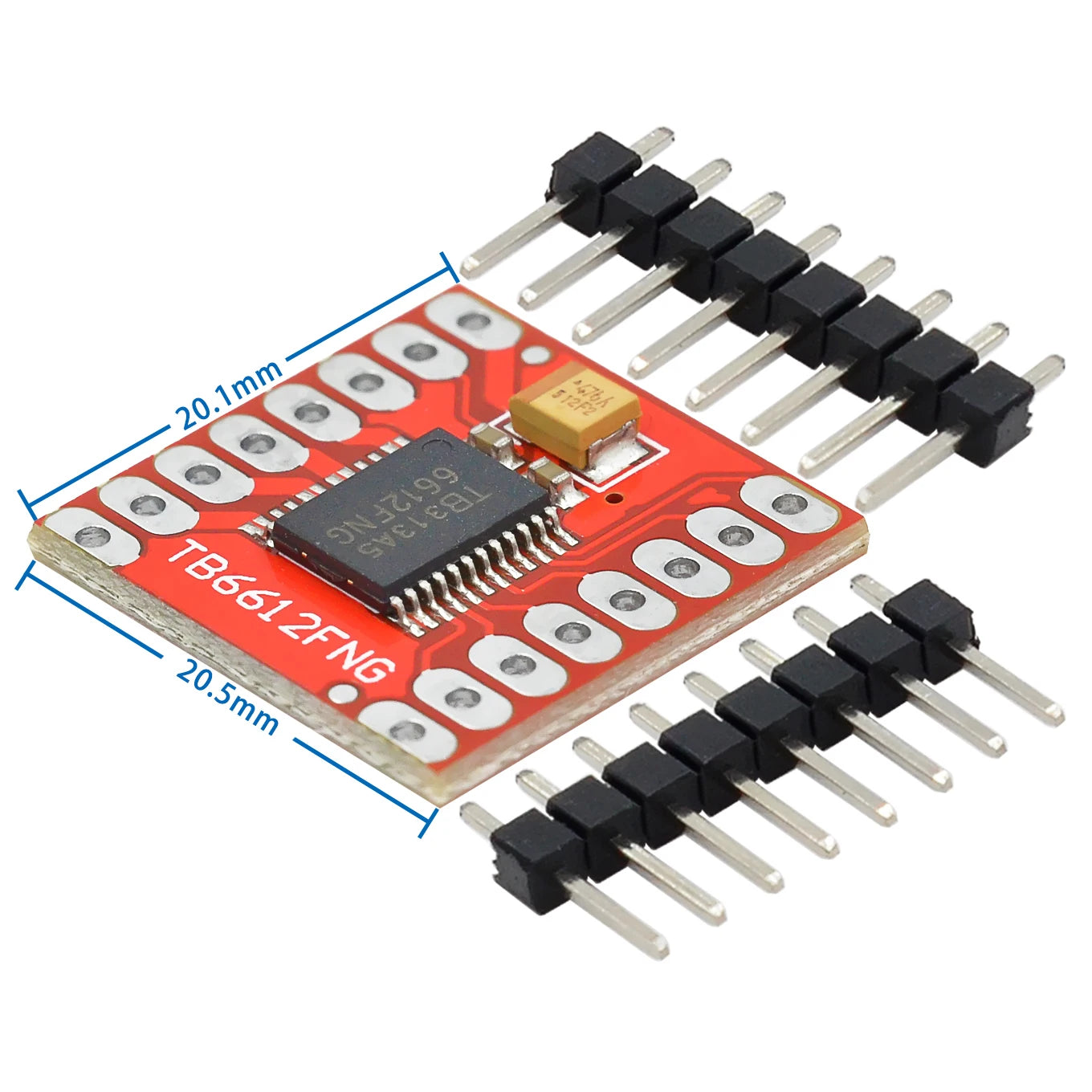
A compact dual H-bridge motor driver module based on the Toshiba TB6612FNG or Texas Instruments DRV8833 IC — providing independent bidirectional control of two DC motors (or one stepper motor) from any microcontroller with PWM output. The H-bridge architecture enables full CW/CCW rotation, PWM speed control, active braking, and coast (stop) modes for each motor channel independently. Built-in thermal shutdown and low voltage detection protect the driver IC from damage under fault conditions. The 0.8×0.8 inch form factor fits in compact robot and automation projects. Available in TB6612FNG (welded), TB6612FNG (solderless), and DRV8833 variants.
Specifications
| Driver IC Options | TB6612FNG (Toshiba) / DRV8833 (Texas Instruments) |
| Motor Supply Voltage (VM) | 2.5V – 15V (TB6612FNG) / 2.7V – 10.8V (DRV8833) |
| Logic Supply Voltage (VCC) | 2.7V – 5.5V |
| Output Current (average) | 1.2A per channel |
| Output Current (peak) | 3.2A per channel |
| Motor Channels | 2 (independent) |
| Control Modes | CW / CCW / Short Brake / Stop (coast) |
| Standby Control | Yes (STBY pin) |
| Protection | Thermal shutdown, low voltage detection |
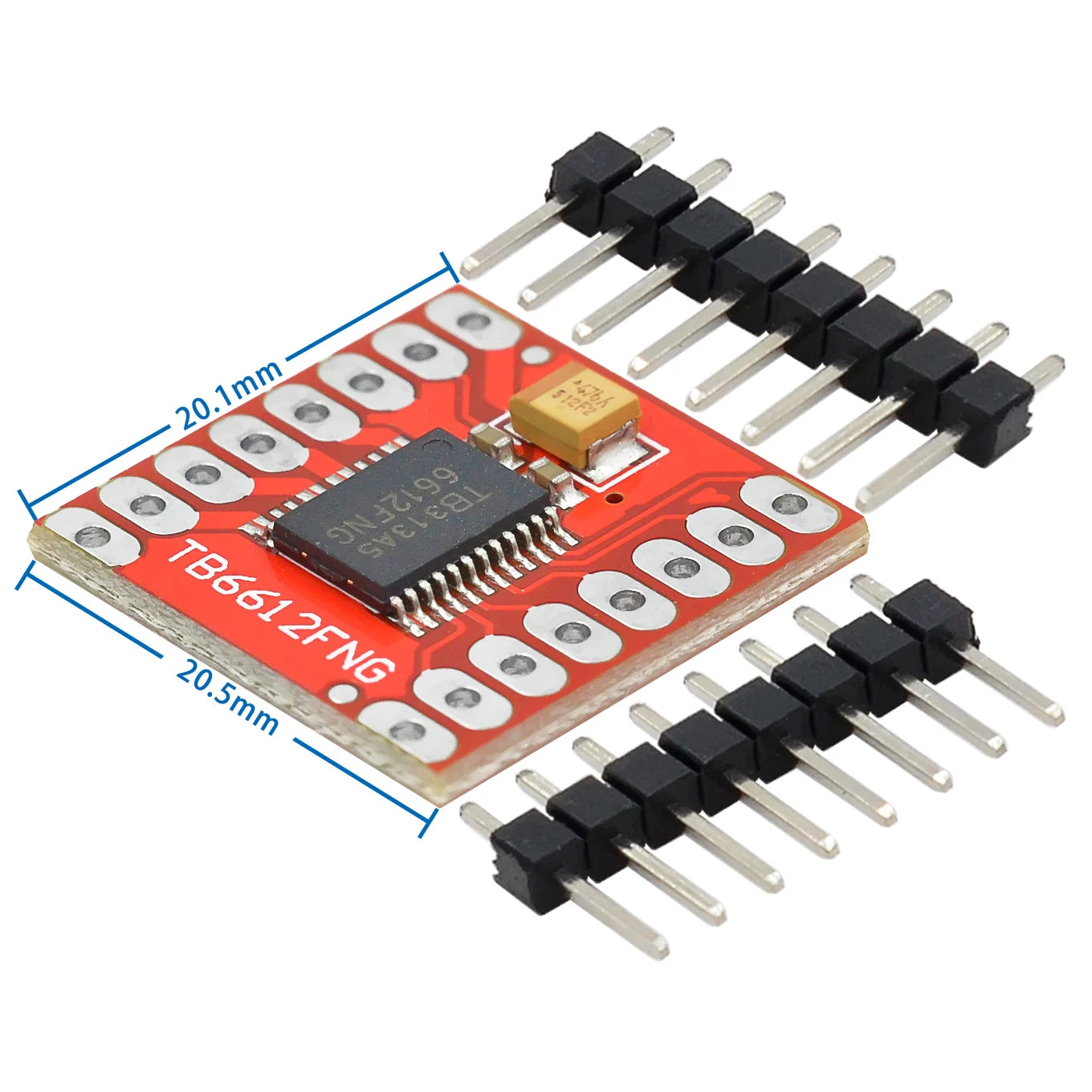
| Dimensions | 0.8 × 0.8 inches (~20 × 20mm) |
| Origin | Mainland China |
TB6612FNG vs. DRV8833 — Which to Choose
| Feature | TB6612FNG | DRV8833 |
|---|---|---|
| Motor supply voltage | 2.5V – 15V | 2.7V – 10.8V |
| Output current (avg) | 1.2A per channel | 1.5A per channel |
| Output current (peak) | 3.2A per channel | 2.0A per channel |
| Standby mode | Yes (STBY pin) | Sleep mode |
| Best for | Higher voltage motors, peak current applications | Lower voltage, higher average current |
Control Mode Truth Table (TB6612FNG)
| IN1 | IN2 | PWM | Mode |
|---|---|---|---|
| H | L | H | CW (clockwise) |
| L | H | H | CCW (counter-clockwise) |
| H | H | H | Short brake |
| L | L | X | Stop (coast) |
Key Features
- ✅ Dual H-bridge — independent bidirectional control of 2 DC motors or 1 stepper motor
- ✅ 1.2A average / 3.2A peak per channel — handles small to medium DC motors
- ✅ CW/CCW/brake/stop modes — full motor control including active braking
- ✅ PWM speed control — smooth speed control via PWM signal from Arduino
- ✅ 2.7V–5.5V logic supply — compatible with Arduino (5V) and ESP32/STM32 (3.3V)
- ✅ Thermal shutdown — protects the driver IC from overtemperature damage
- ✅ Low voltage detection — protects motors from undervoltage operation
- ✅ Compact 0.8×0.8 inch — fits in small robot and automation project enclosures
- ✅ Standby control — STBY pin enables low-power standby mode
Common Applications
- Arduino DC motor control (2 motors)
- Robot drive motor controller
- Stepper motor driver (bipolar stepper, 1 motor)
- RC car motor controller
- Camera gimbal motor driver
- Conveyor and automation motor control
- Fan speed control
- Pump motor control
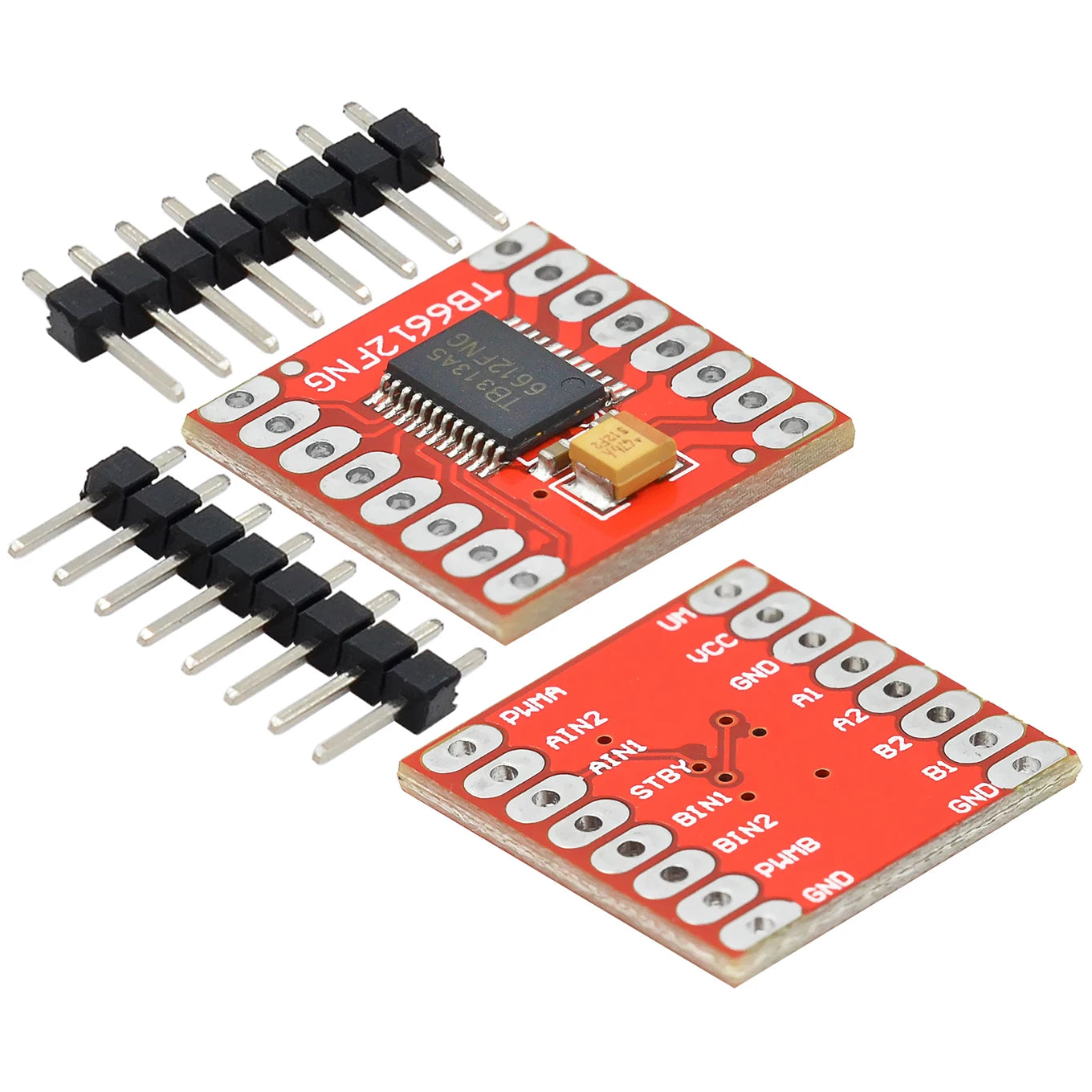
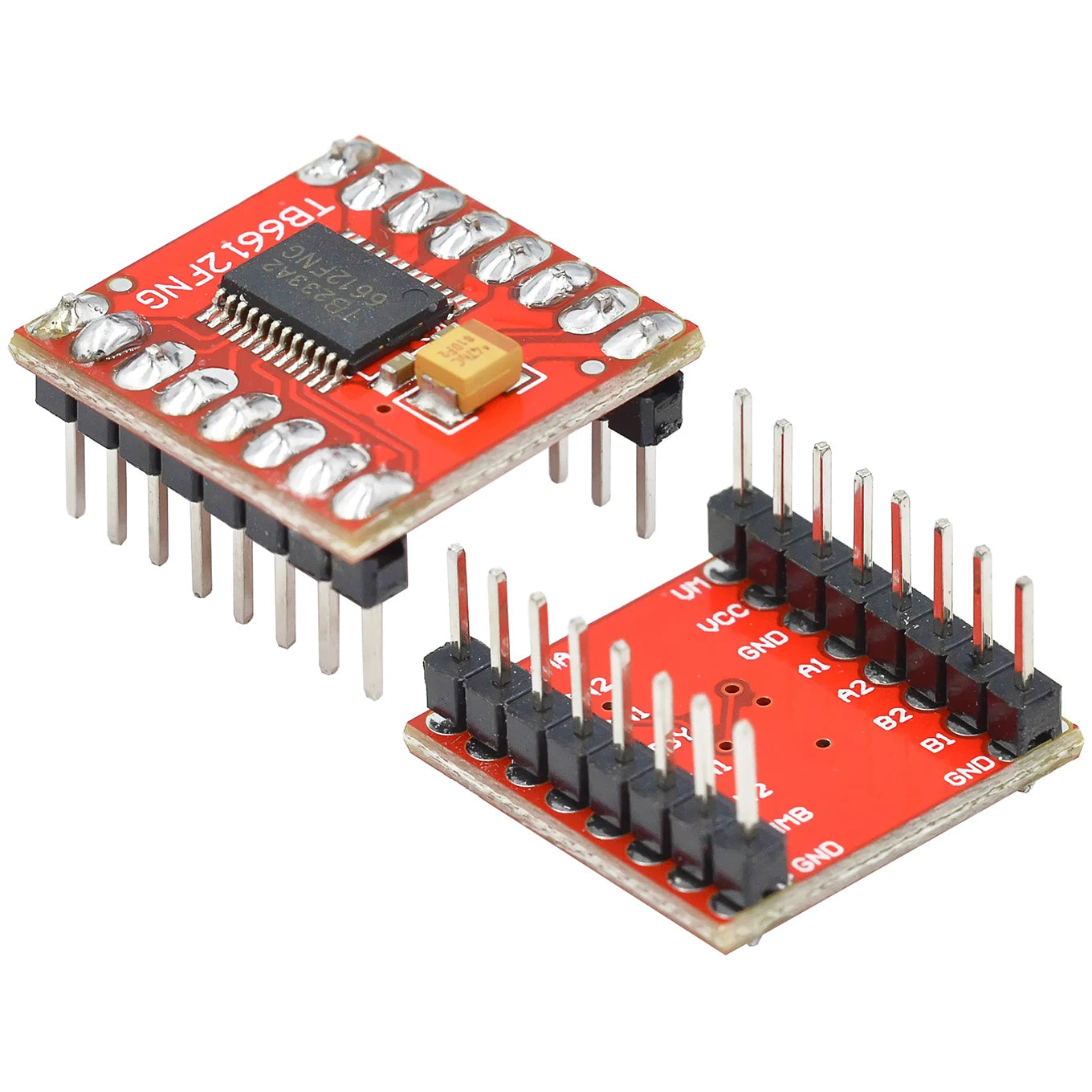
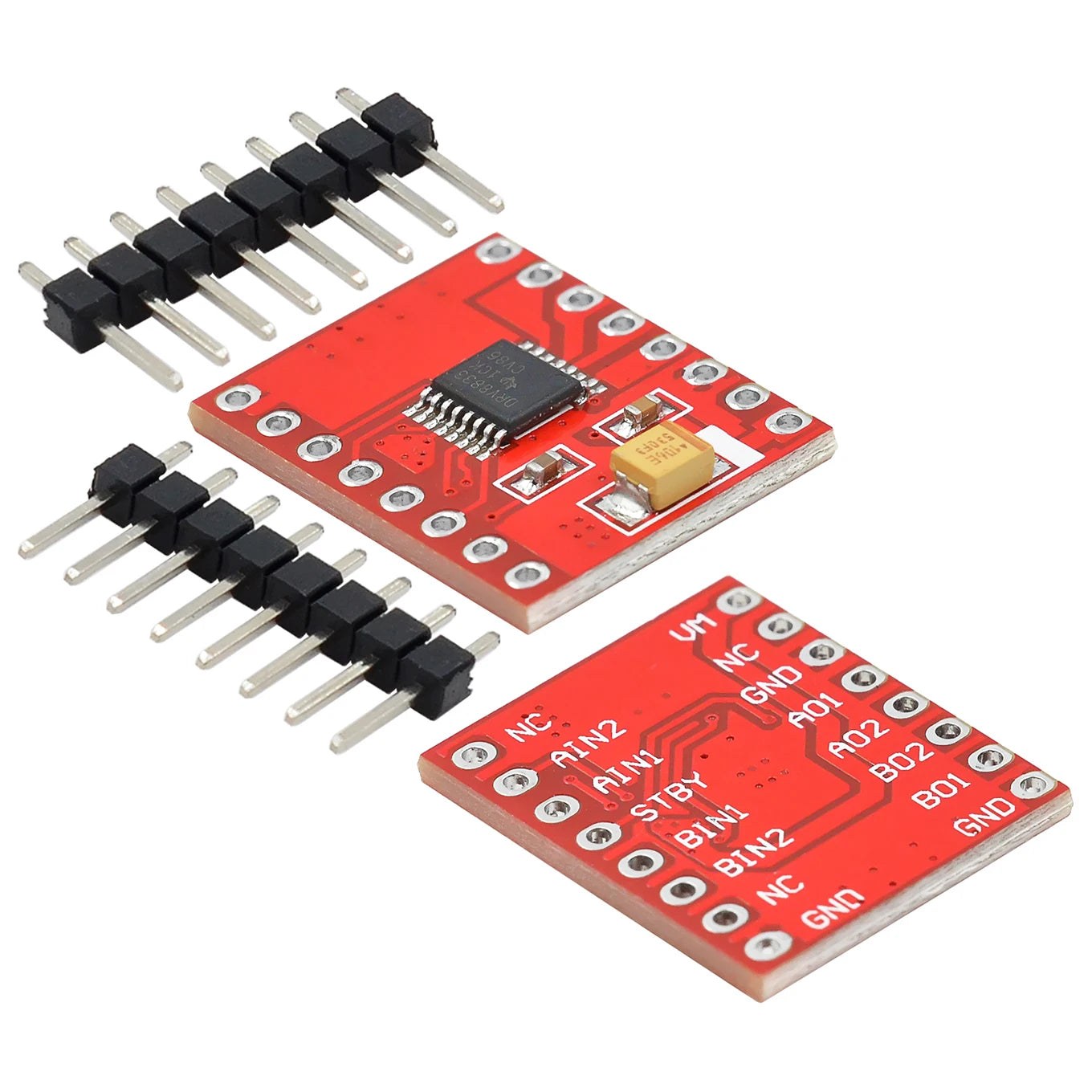
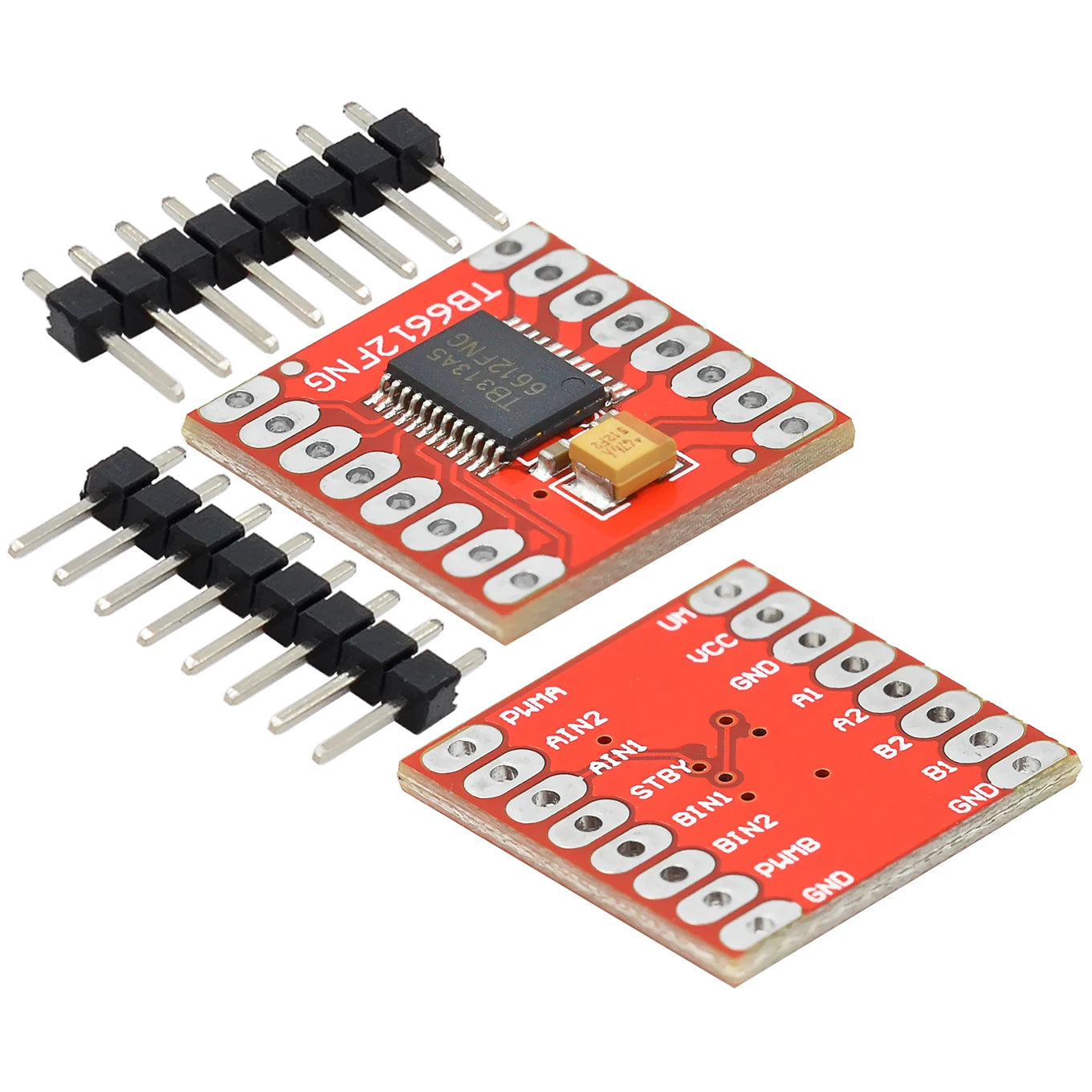
Arduino Wiring (TB6612FNG)
- Connect VM to motor supply voltage (2.5V–15V).
- Connect VCC to Arduino 5V (logic supply).
- Connect GND to Arduino GND.
- Connect STBY to Arduino 5V (or a digital pin) to enable the driver.
- Connect AIN1, AIN2 to Arduino digital pins for motor A direction control.
- Connect PWMA to Arduino PWM pin for motor A speed control.
- Connect motor A wires to AO1 and AO2 terminals.
- Repeat for motor B (BIN1, BIN2, PWMB, BO1, BO2).
Frequently Asked Questions
Q: Can I drive a stepper motor with this module?
A: Yes. Connect the two coils of a bipolar stepper motor to channels A and B. Use a stepper library (e.g., AccelStepper) to control the step sequence.
Q: What is the difference between “welded” and “solderless” TB6612FNG variants?
A: The “welded” variant has header pins pre-soldered. The “solderless” variant is supplied without header pins, allowing you to solder your own headers or wires directly to the PCB pads.
Package Contents
- 1× TB6612FNG or DRV8833 Dual Motor Driver Module (variant as selected)